





























4 Repair
4.4.1. Replacement of wrist IRB 2400/10/16
97
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
Removal, wrist unit
The procedure below details how to remove the wrist from the robot upper arm.
The wrist, which includes axes 5 and 6, is a complete unit comprising drive units and
gearboxes. It is a replacement unit of complex design and should not normally be serviced
on-site. Instead it should be sent to ABB for service etc.
ABB recommends its customers to carry out only the following servicing and repair work on
the wrist.
Refitting, wrist unit
The wrist, which includes axes 5 and 6, is a complete unit comprising drive units and
gearboxes. It is a replacement unit of complex design and should not normally be serviced
on-site. Instead it should be sent to ABB for service.
The procedure below details how to refitt the wrist to the robot upper arm.
Action
Note
1.
DANGER!
Turn off all electric power, hydraulic and pneumatic
pressure supplies to the robot!
2. Remove the
oil plug
on the wrist and drain it from all
the oil.
.
3. Undo the
attachment screws
and remove the wrist.
.
Action
Note/Illustration
1.
DANGER!
Turn off all electric power, hydraulic and pneumatic
pressure supplies to the robot!
2. Clean the surface of the tubular shaft.
3. Lubricate the
o-ring
with
grease
to be sure that it
does not get displaced, and fit it in its position on the
upper arm tubular.
Art. no. is specified in
.
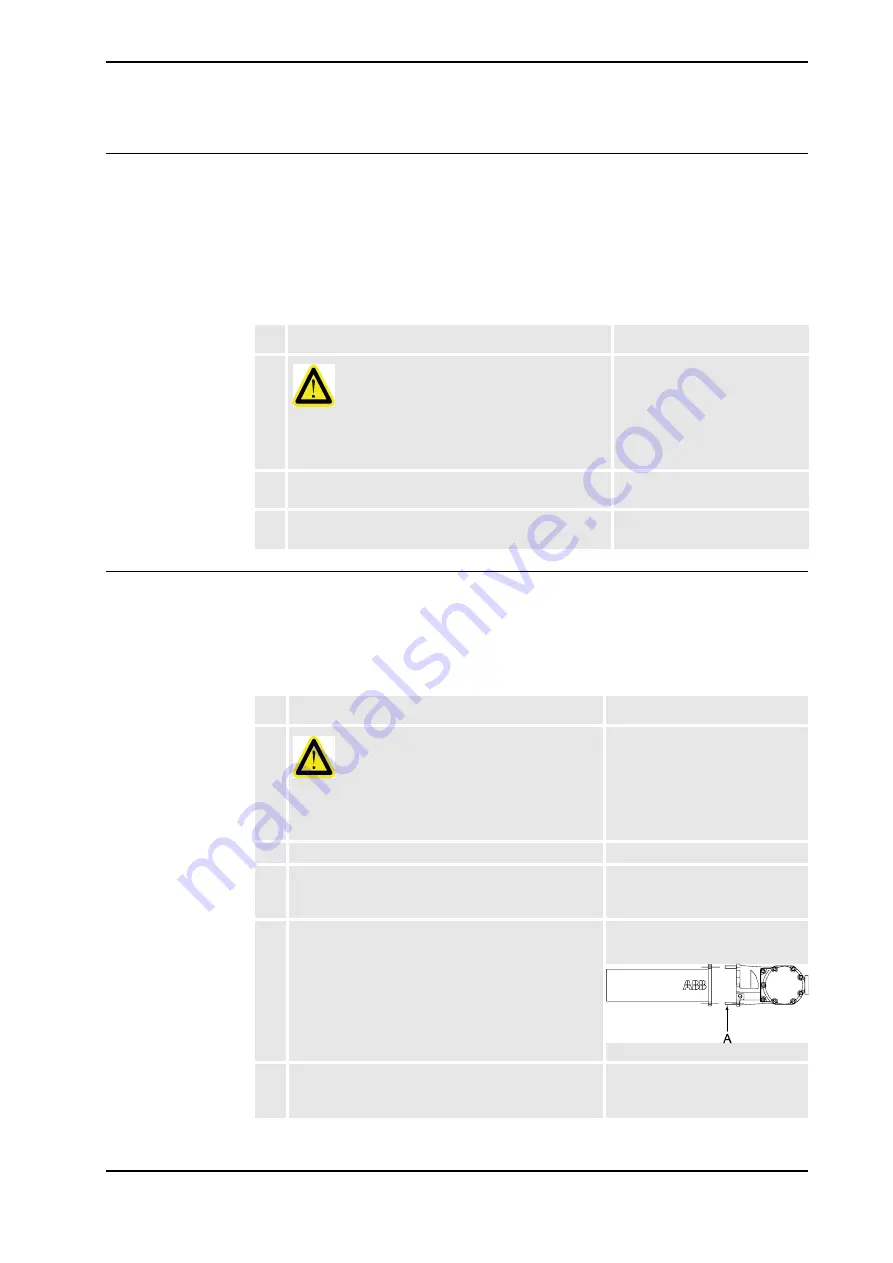
4. Fit the two
guide pins
(A) diagonally on the wrist.
Carefully push the wrist against the tubular. When
the gears are meeting each other, they may need to
be rotated to mesh properly.
xx0200000424
5. Fix the wrist with two screws and two washers.
Remove the M8 guide pins and fit the other two
screws and washers.
Continued
Continues on next page
Содержание IRB 2400/L
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......







































































