




























2 Installation and commissioning
2.4.1. Introduction
51
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
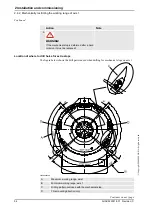
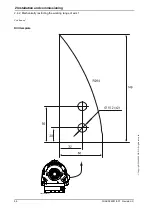
2.4 Restricting the working range
2.4.1. Introduction
General
When installing the robot, make sure that it can move freely within its entire working space.
If there is a risk that it may collide with other objects, its working space should be limited.
The working range of the following axes may be restricted:
•
Axis 1, hardware (mechanical stop and position switch)
•
Axis 2, hardware (mechanical stop).
•
Axis 3, hardware (limit switch)
This section describes how to install hardware that restricts the working range.
Notice that adjustments must also be made in the software. References to software manuals
are given in the following installation procedures.
Содержание IRB 2400/10
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......





















































