




























2 Installation and commissioning
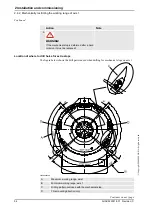
2.2.2. Working range
43
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
IRB 2400/10, /16
The working area is the same for both floor and inverted (suspended). Positions are located
at wrist center.
xx0200000160
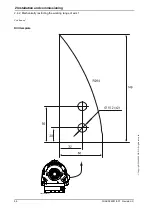
Positions in the working range
The table below specifies the positions inside the working range, shown in the figure above.
Pos.
X
Z
Angle axis 2
Angle axis 3
0
855
1455
0
0
1
360
2041
0
-60
2
541
693
0
65
3
1351
-118
110
-60
4
400
-302
110
18.3
5
-1350
624
-100
-60
6
-53
1036
-100
65
Position in figure
Position (mm)
Angles (º)
X
Z
Axis 2
Axis 3
1
870
1139
0
0
2
510
1246
-28
-17
3
446
722
-28
31
4
515
218
60
119
5
607
-73
85
119
6
1506
210
85
26
7
1313
1148
42
-17
Continued
Содержание IRB 2400/10
Страница 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Страница 2: ......
Страница 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Страница 16: ...Product documentation M2004 3HAC022031 001 Revision C 14 Copyright 2004 2008 ABB All rights reserved ...
Страница 191: ......
Страница 192: ......
Страница 193: ......
Страница 194: ......
Страница 195: ......
Страница 198: ......
Страница 199: ......
Страница 202: ......
Страница 203: ......
Страница 205: ......
Страница 210: ...8 Circuit diagram 8 1 Introduction 3HAC022031 001 Revision C 198 Copyright 2004 2008 ABB All rights reserved Continued ...
Страница 211: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 101 LIST OF CONTENTS ...
Страница 214: ...Manipulator Circuit Diagram 3HAC 6670 3 Rev 01 Product Manual IRB 2400 No of Sheets 13 Sheet no 104 MOTOR AXIS 1 3 ...
Страница 226: ......





















































