



























Note
Action
2 pcs, M6 x 16.
Fit the
attachment plate
to the base of the
robot with the two attachment screws.
7
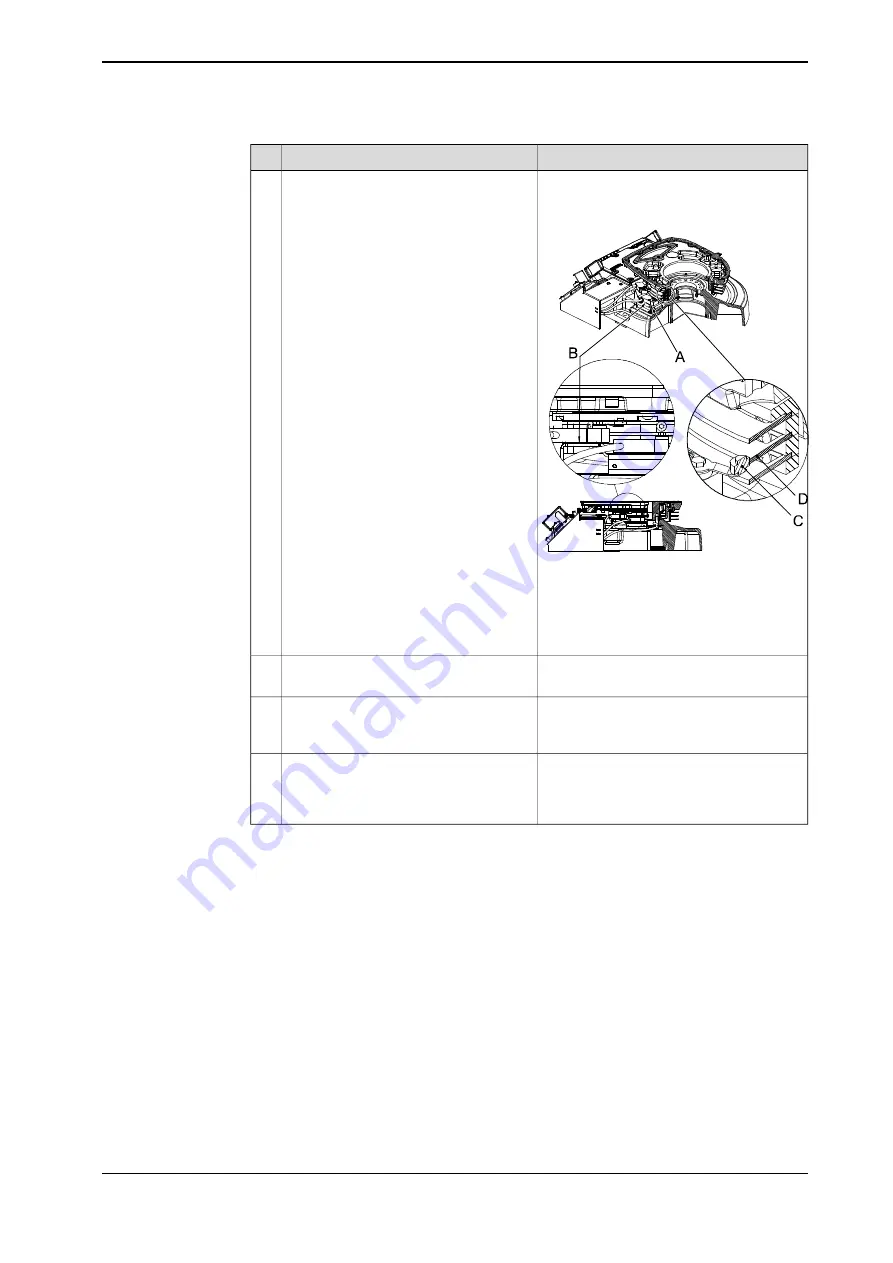
Shown in the figure
xx0400001358
A Attachment plate
B Shims
C Roller
D Cam
Fit the switches to the attachment plate.
Adjust the height of the switches with
shims
until each roller aligns with corres-
ponding cam.
Shown in the figure
Secure the cabling inside the housing
with
cable straps
.
8
The cabling and connection points are
specified in section
robot base to controller (option) on page 121
Connect the position switch cabling.
9
The system parameters that must be
changed (
Upper joint bound
and
Lower joint
bound
) are described in
Technical reference
manual - System parameters
.
Adjust the software working range limita-
tions (system parameter configuration)
to correspond to the mechanical limita-
tions.
10
Product manual - IRB 1600/1660
115
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
2 Installation and commissioning
2.4.5 Installation of position switch, axis 1
Continued
Содержание IRB 1600
Страница 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Страница 2: ...Trace back information Workspace R18 2 version a18 Checked in 2018 11 20 Skribenta version 5 3 012 ...
Страница 8: ...This page is intentionally left blank ...
Страница 18: ...This page is intentionally left blank ...
Страница 48: ...This page is intentionally left blank ...
Страница 152: ...This page is intentionally left blank ...
Страница 336: ...This page is intentionally left blank ...
Страница 372: ...This page is intentionally left blank ...
Страница 388: ...This page is intentionally left blank ...
Страница 396: ......
Страница 397: ......







































































