




























4.4.5 Replacing the wrist unit, IRB 1600ID
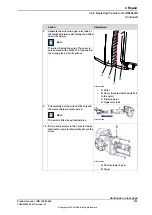
Note
After replacement of motors/motor or gearbox in a manipulator, recalibration is
required.
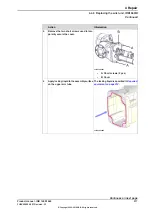
Location of wrist unit
The wrist unit is located in the frontmost part of the upper arm.
A
B
E
F
D
C
G
xx0700000025
Upper arm
A
Wrist
B
Motor axis 6
C
Hexagon socket head screw M5x25
D
Hexagon socket head screw M5X16 (10.9) (Short head)
E
Hexagon socket head screw M5x25
F
Hexagon socket head screw M8x35
G
Required equipment
Note
Art. No.
Equipment
See
Wrist, ID
O-ring
Continues on next page
206
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.5 Replacing the wrist unit, IRB 1600ID
Содержание IRB 1600
Страница 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Страница 2: ...Trace back information Workspace R18 2 version a18 Checked in 2018 11 20 Skribenta version 5 3 012 ...
Страница 8: ...This page is intentionally left blank ...
Страница 18: ...This page is intentionally left blank ...
Страница 48: ...This page is intentionally left blank ...
Страница 152: ...This page is intentionally left blank ...
Страница 336: ...This page is intentionally left blank ...
Страница 372: ...This page is intentionally left blank ...
Страница 388: ...This page is intentionally left blank ...
Страница 396: ......
Страница 397: ......







































































