




























Note
Action
Detailed in section
.
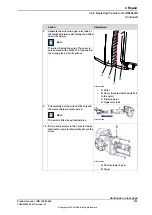
Perform a leak-down test.
9
Detailed in section
.
Refill the wrist unit with oil.
10
Seal and paint the joints that have been
opened. See
the robot before replacing parts on
page 159
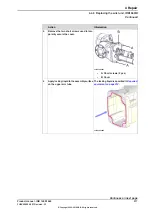
Note
After all repair work, wipe the robot free
from particles with spirit on a lint free
cloth.
11
Pendulum Calibration is described in
Oper-
ating manual - Calibration Pendulum
, en-
closed with the calibration tools.
Recalibrate the robot!
12
Axis Calibration is described in
with Axis Calibration method on page 349
.
General calibration information is included
in section
.
DANGER
Make sure all safety requirements are
met when performing the first test run.
These are further detailed in the section
First test run may cause injury or dam-
age on page 28
13
Product manual - IRB 1600/1660
205
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.4 Replacing the wrist unit, IRB 1600
Continued
Содержание IRB 1600
Страница 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Страница 2: ...Trace back information Workspace R18 2 version a18 Checked in 2018 11 20 Skribenta version 5 3 012 ...
Страница 8: ...This page is intentionally left blank ...
Страница 18: ...This page is intentionally left blank ...
Страница 48: ...This page is intentionally left blank ...
Страница 152: ...This page is intentionally left blank ...
Страница 336: ...This page is intentionally left blank ...
Страница 372: ...This page is intentionally left blank ...
Страница 388: ...This page is intentionally left blank ...
Страница 396: ......
Страница 397: ......


































































