























TMC-4 Control Card
for Electric Actuators
Installation & Maintenance Manual
11
04/06/22
www.atcontrols.com
IOM08139 REVISION 04
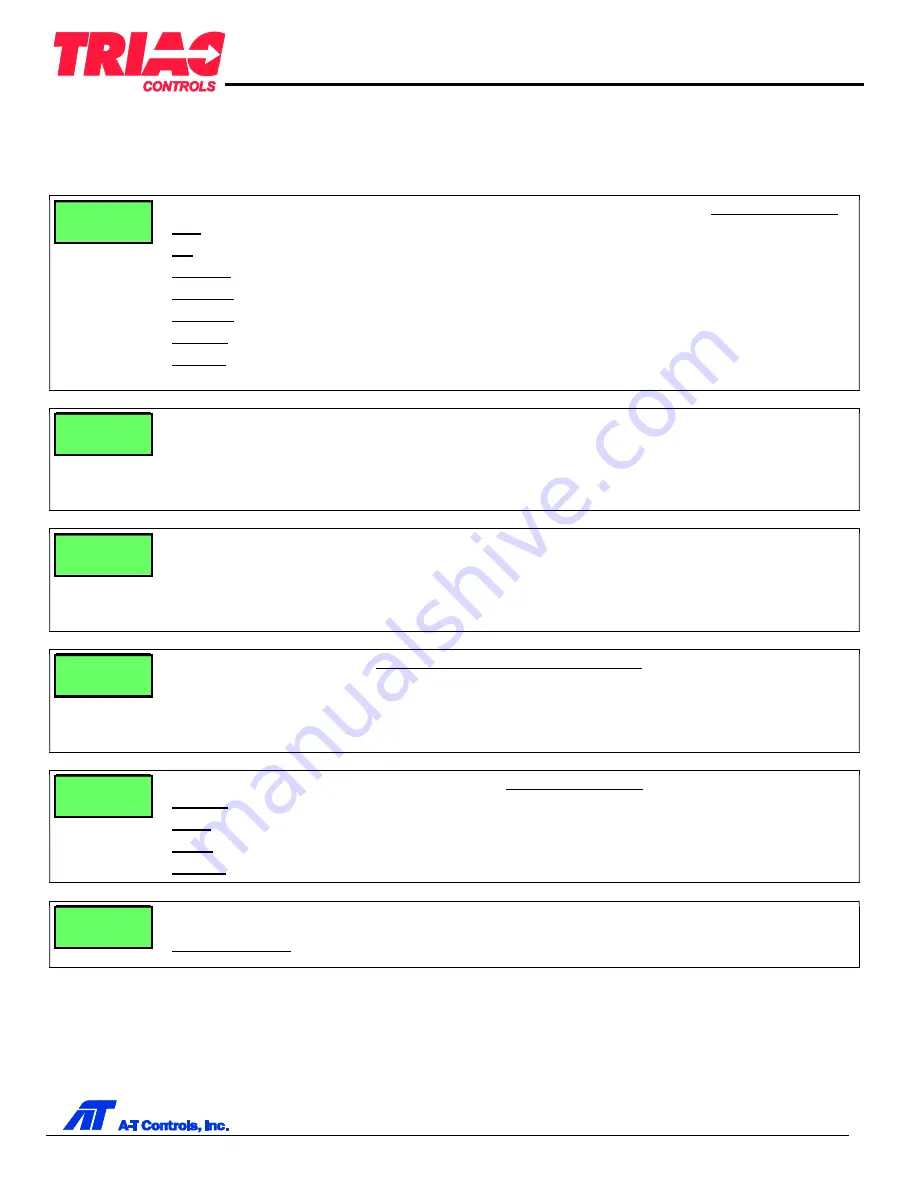
3.2.
COMMAND CONFIG submenu
The
COMMAND CONFIG
menu group contains various parameters associated with the control and response of the
actuator. The command signal type and limits are set in this submenu, as are loss of signal behavior and deadband.
C O M M A N D
T Y P E :
x x x x
Command
Signal Type
Sets type of command signal used. Zero and Span should be recalibrated when changed. DEFAULT = mA Sink
10V:
0-10V or 2-10V, configurable with the zero and span setting.
5V:
0-5V or 1-5V, configurable with the zero and span setting.
mA Sink:
4-20mA sinking. Loop is powered by user.
135 Ohm:
Variable resistance input. For typical 135 Ω slide wire.
1k Ohm:
Variable resistance input. For 1 kΩ potentiometer.
ON-OFF:
Independent Open and Close inputs. Feedback is disabled.
Comms:
Communication protocol (e.g. Modbus RTU) Specific protocol must be
selected in the
COMMS CONFIG
submenu.
C A L I B R A T E
Z E R O
x x x x
Calibrate
Command Zero
Sets command signal zero digital count value. When selected, provide minimum command signal for direct action,
and maximum control signal for reverse action. An input of this magnitude will drive actuator toward the
programmed “Calibrate Close Pos” in the
POSITION CONFIG
menu.
Value is scaled between 12 bit count of 0 and 4095 for the selected command type range. Typical values can be
found in Section 4.2.1.
C A L I B R A T E
S P A N
x x x x
Calibrate
Command Span
Sets command signal span digital count value. When selected, provide maximum command signal for direct
action, and minimum control signal for reverse action. An input of this magnitude will drive actuator toward the
programmed “Calibrate Open Pos” in the
POSITION CONFIG
menu.
Value is scaled between 12 bit count of 0 and 4095 for the selected command type range. Typical values can be
found in Section 4.2.1.
D E A D B A N D
x . x %
Deadband
Sets deadband range by percent. RANGE = 0.5% to 50.0% DEFAULT = 1.0%
This value determines the acceptable deviation from command setpoint the controller will recognize as valid
position. If set to 1.0%, when provided a 50.0% setpoint, the controller will position to between 49.0% and 51.0%.
A setpoint outside a value in this range must be provided to move.
When selected, use [PREVIOUS ▲] or [NEXT ▼] to adjust value.
L O S S O F
S I G N A L :
x x x x
Loss of Signal
Sets behavior of actuator when command signal is lost. DEFAULT = Fail Close
In Place:
Remains in current position on loss of command signal.
Open:
Moves to programmed Open position on loss of command signal.
Close:
Moves to programmed Close position on loss of command signal.
Percent:
Moves to position specified in “Fail to Percent” setting.
F A I L T O
P E R C E N T :
x x x x
Fail to Percent
Sets percent position between 0% and 100% for actuator to control to on loss of command signal. Is only utilized if
“Loss of Signal” type is set as “Position”.
DEFAULT = 50.0%.







































































