





























XPLC300 Motion Controller Hardware Manual V1.5
weak current, it is recommended for the distance to be more than 20cm.
⚫
It should be noted that the equipment grounding (chassis) on the entire line must be
good, and the grounding of the chassis should be connected to the standard factory
ground pile.
⚫
When routing terminal wiring cables, avoid bundling them with cables with strong
interference signals such as power lines, and must route them separately.
→
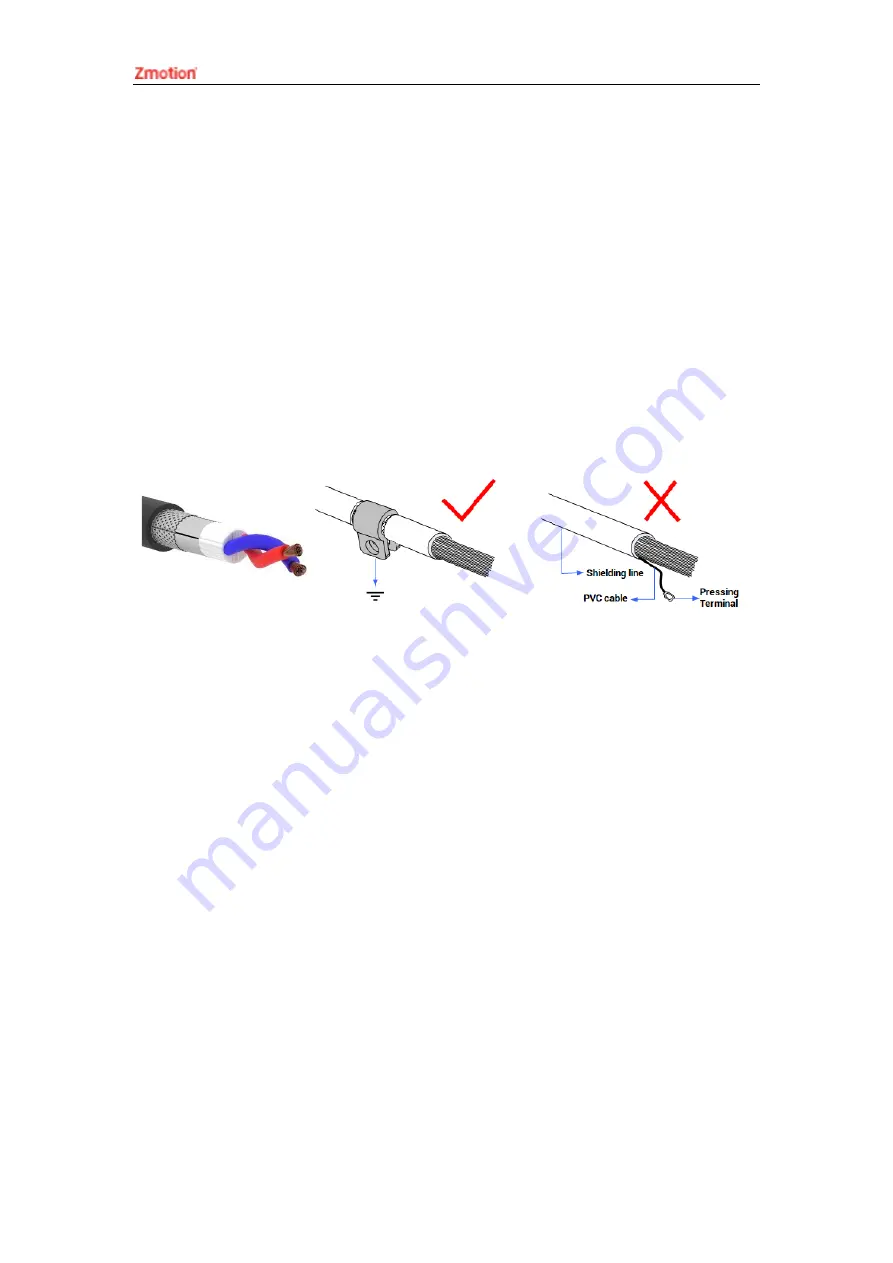
Cable Requirements:
Shielded Twisted Pair, and the shielded cable is grounded.
3.1.3.
Basic Usage Method
(1)
Please follow the above wiring instructions to wiring correctly.
(2)
After powered on, please use any one interface among the three interfaces
(ETHERNET, RS232, RS485) to connect to ZDevelop;
(3)
Please use the "ADDRESS" and "SETCOM" commands to set and view the protocol
station number and configured parameters, see "ZBasic Programming Manual" for
details.
(4)
Please use the "CANIO_ADDRESS" command to set the master's "address" and
"speed" according to the needs, and use the "CANIO_ENABLE" command to enable or
disable the internal CAN master function, or through "ZDevelop/Controller/State the
Controller/Communication
Info” to
view the CAN status intuitively, and refer to the
Summary of Contents for XPLC300
Page 1: ......







































































