





























8.12 Additional Adjustment Functions
8.12.8 Backlash Compensation
8-78
Operation When the Servo Is OFF
Backlash compensation is not applied when the servo is OFF (i.e., when power is not supplied
to motor). Therefore, the reference position POS is moved by only the backlash compensation
value.
The relationship between APOS and the motor shaft position is as follows:
•
When servo is OFF: APOS = Servomotor shaft position
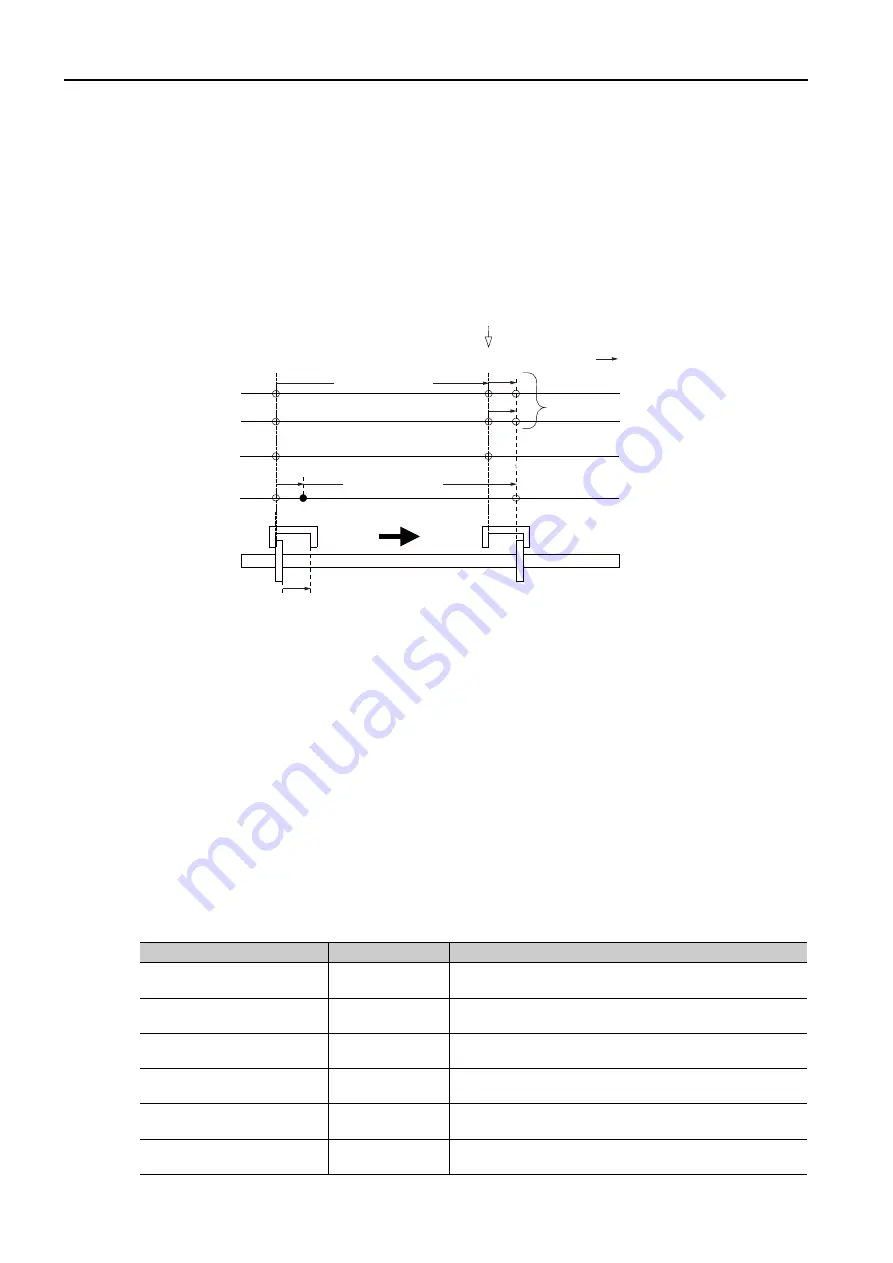
The following figure shows what happens when the servo is turned OFF after driving the Servo-
motor in the forward direction from target position TPOS0 to TPOS1. Backlash compensation
is not applied when the servo is OFF. (The SERVOPACK manages the position data so that
APOS and POS are the same.)
Operation When There Is Overtravel
When there is overtravel (i.e., when driving is prohibited due to an overtravel signal or software
limit), the operation is the same as for when the servo is OFF (
on page 8-78), i.e., backlash compensation is not applied.
Operation When Control Is Changed
Backlash compensation is performed only for position control.
Backlash compensation is not applied when position control is changed to any other control
method.
Backlash compensation is applied in the same way as when the servo is ON (
on page 8-77) if any other control method is changed to position con-
trol.
Related Monitoring
You can monitor the following values on the operation monitor of the S.
Displayed Value
Unit
Specification
Input Reference Pulse Speed
min
-1
Displays the input reference pulse speed before backlash
compensation.
Position Deviation
Reference units
Displays the position deviation for the position reference
after backlash compensation.
Input Reference Pulse
Counter
Reference units
Displays the input reference pulse counter before back-
lash compensation.
Feedback Pulse Counter
Encoder pulses
Displays the number of pulses from the actually driven
motor encoder.
Fully-Closed Feedback Pulse
Counter
External encoder
resolution
Displays the number of pulses of the actually driven exter-
nal encoder.
Feedback Pulse Counter
Reference units
Displays the number of pulses from the actually driven
encoder in reference units.
Pn2
3
1
TPO
S
0
TPO
S
1
PO
S
APO
S
S
ervo OFF
Target po
s
ition
Forward
reference
direction
S
tatu
s
with no backla
s
h
compen
s
ation: PO
S
= APO
S
Reference travel di
s
tance
Reference travel di
s
tance
Target po
s
ition
Motor
s
haft
Machine
s
haft
Motor
s
haft
Machine
s
haft
Backla
s
h compen
s
ation value (Pn2
3
1)





















































