1-19
183574-1CD
183574-1CD
1
Introduction
1.4 System Overview and Variations
ArcWorld 50/50S/52/52S
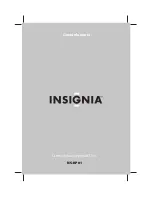
– Station#1 Stopped: Headstock in Station 1 has motion monitored to
0.2 degrees of motion (allows some variance when installing parts /
fixture.)
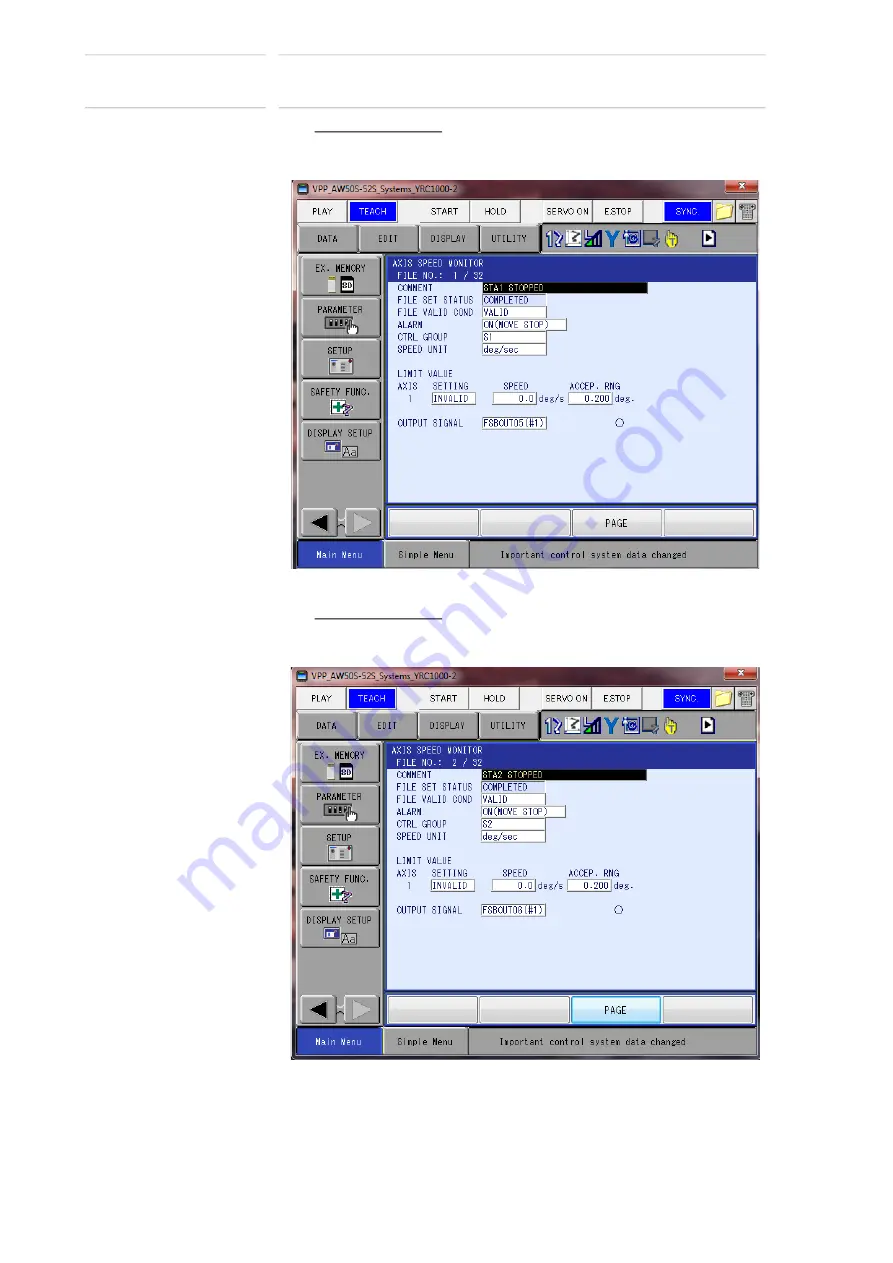
– Station#2 Stopped: Headstock in Station 2 has motion monitored to
0.2 degrees of motion (allows some variance when installing parts /
fixture.)
46 of 126