





























K/iK Series AC Servo Driver
65
In speed control mode, even if OV reference is sent under analog reference voltage, motor
will rotate with low speed in case of small reference voltage offset (unit: mV) of superior control
unit or in external circuit. In such case, reference offset can be automatically or manually adjusted
by panel operator. See "5.2 Operation in Auxiliary Function Execution Mode" for details.
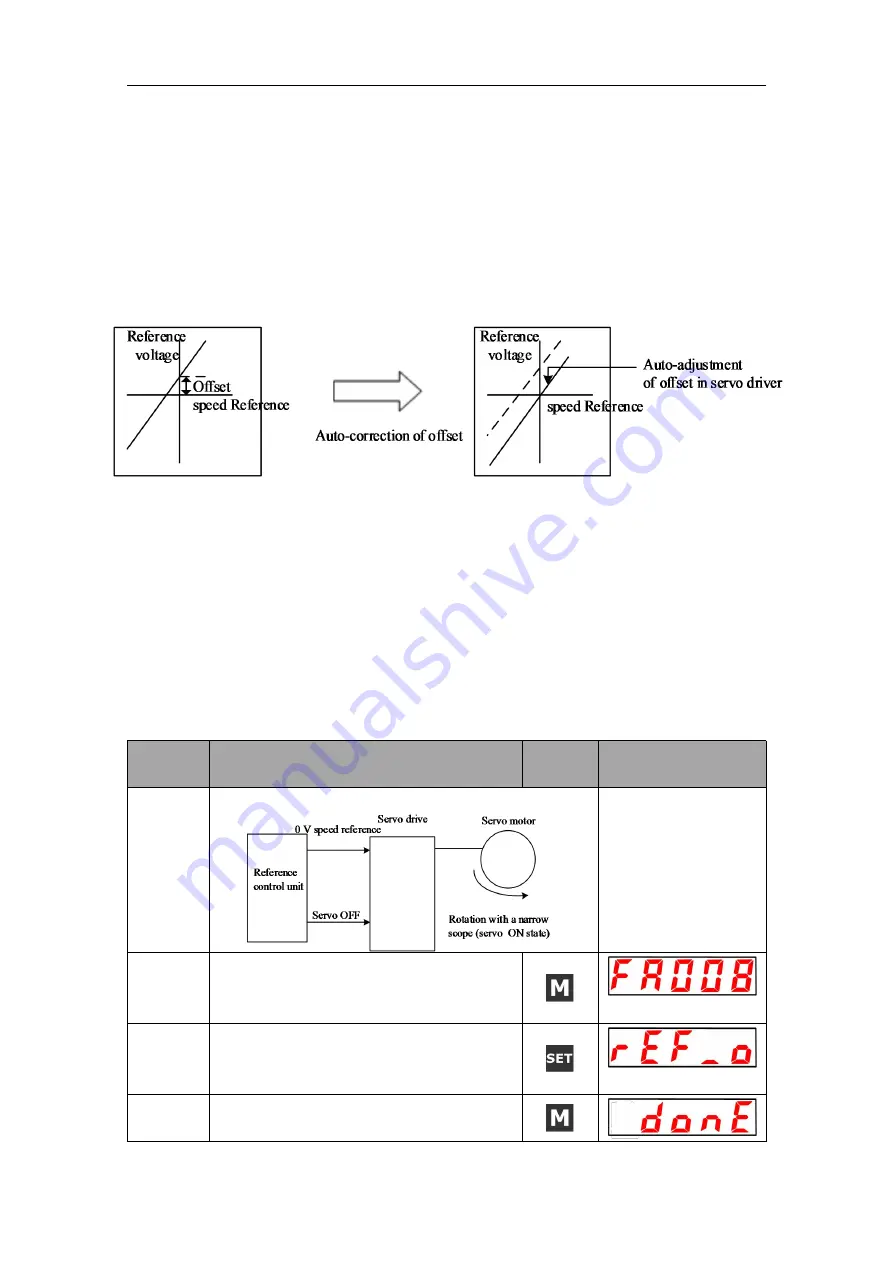
Auto-adjustment of analog (speed · torque) or reference offset is the function for offset
measurement and auto-adjustment of voltage.
In case of voltage reference offset of the superior controller or in external circuit, servo driver
will make following adjustment towards the automatic offset.
Once auto-adjustment of reference offset begins, offset will be saved in the servo driver.
Offset can be confirmed through manual adjustment of speed reference offset (F
□
006). See
"5.5.3(2) Manual adjustment of speed reference offset" for details.
(1)
Auto-adjustment of speed reference offset
When offset pulse is set as zero with the servo locked in the OFF state by the command
controller equipped with a position loop, auto-adjustment of reference offset (F□008) is not
available, instead, manual adjustment of speed reference offset (F□00A) should be applied.
Under speed reference of zero, function of zero clamping speed control which can lock the
servo in a mandatory manner is provided. See "5.5.6 Use of Zero Clamping Function" for details.
Note:
Auto-adjustment of zero analog offset should be conducted when the servo is OFF.
Auto-adjustment of speed
reference offset of A axis is conducted as below.
Operation
steps
Operation instruction
Operation
key
Display after operation
1
Set the servo unit as OFF,
and input OV
reference
voltage through
reference
controller
or
external
circuit.
2
Press M function key to select auxiliary function mode
for A axis. In case of failing to display FA008, press
UP or DOWN to set.
3
Press SET, and "rEF_o" is displayed.
4
Press M function key to start auto-zeroing, and
flickering "donE" is displayed.







































































