





























上海维宏电子科技股份有限公司
Weihong Electronic Technology Co., Ltd.
- 72 - Specialized, Concentrated, Focused
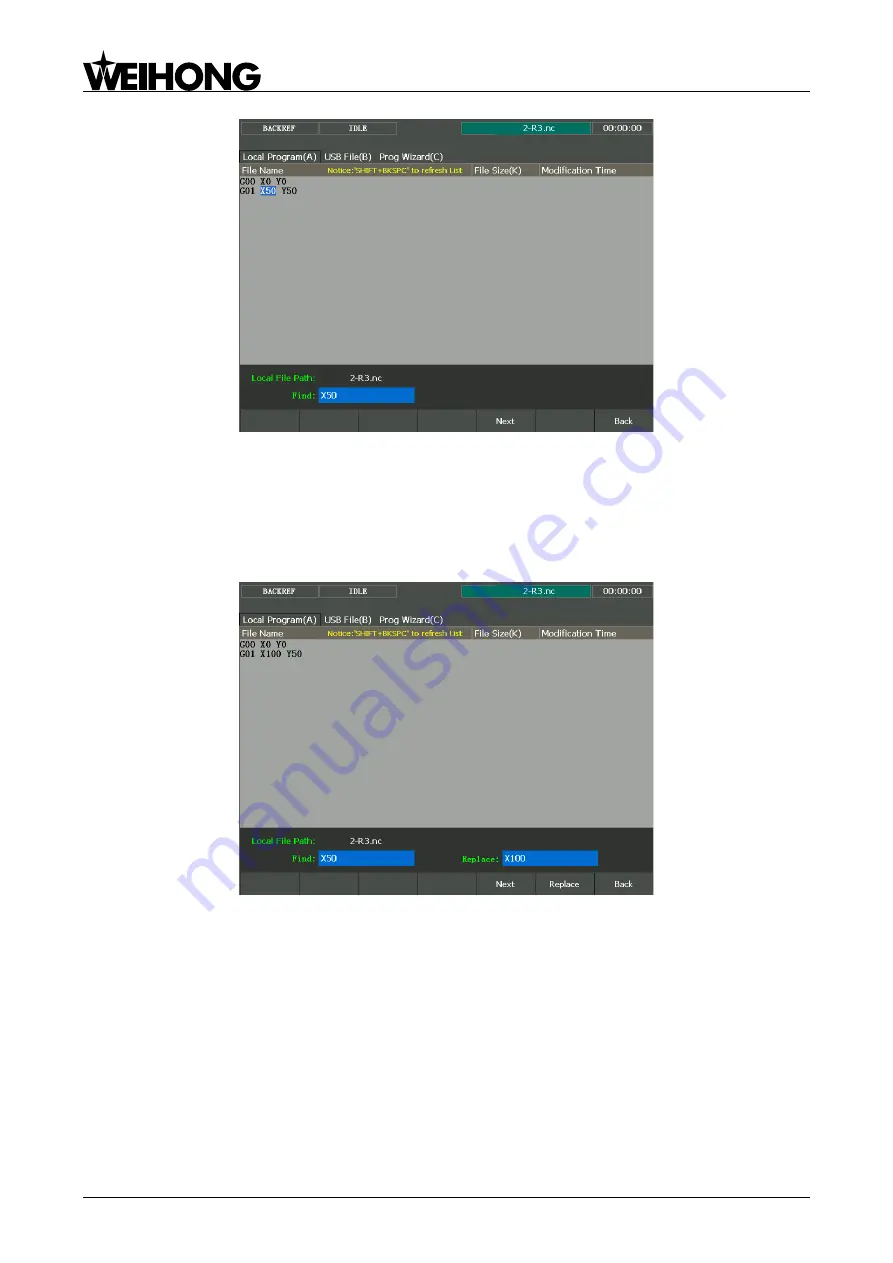
Fig. 3-48 Find page
If you want to replace a certain program block, you can
press F5 ―Replace‖. Enter the find content
and
replace content, and then press ―Enter‖. In the replace page, press F6 ―Replace‖ to replace the find
content with the replace content, and then pre
ss F5 ―Next‖ to find the next place, and then press F6 to
execute replacement. You can continue this process until all the find content are replaced by the replace
content
, or press F7 ―Back‖ to go back. See Fig. 3-49.
Fig. 3-49 Replace page
If you want to clear the contents in the edit page, you can press F6 ―Clear Contents‖.
Unload and Copy to USB
Pressing shortcut key F2 will unload the file currently being processed, corresponding to the
operation of ―Load‖.
Pressing shortcut key F6 (the premise is that a removable disk has already been inserted) will copy
the file selected to the removable disk.
Press letter key B to enter [USB File (B)] screen, as shown in Fig. 3-50, in which files in the USB
flash disk can be read in. Users can also do the following operations to them, like ―Load‖, ―unload‖, ―Edit‖,
―Delete‖, ―New‖, ―Rename‖, and ―Copy to local‖. Folders can be opened by pressing ―Enter‖.







































































