





















Command and Log Reference
7
8
saveconfig
Save configuration
If base station coordinate is unknown, we provide you obtain the average values
from a period time of positioning results in specific conditions. The following
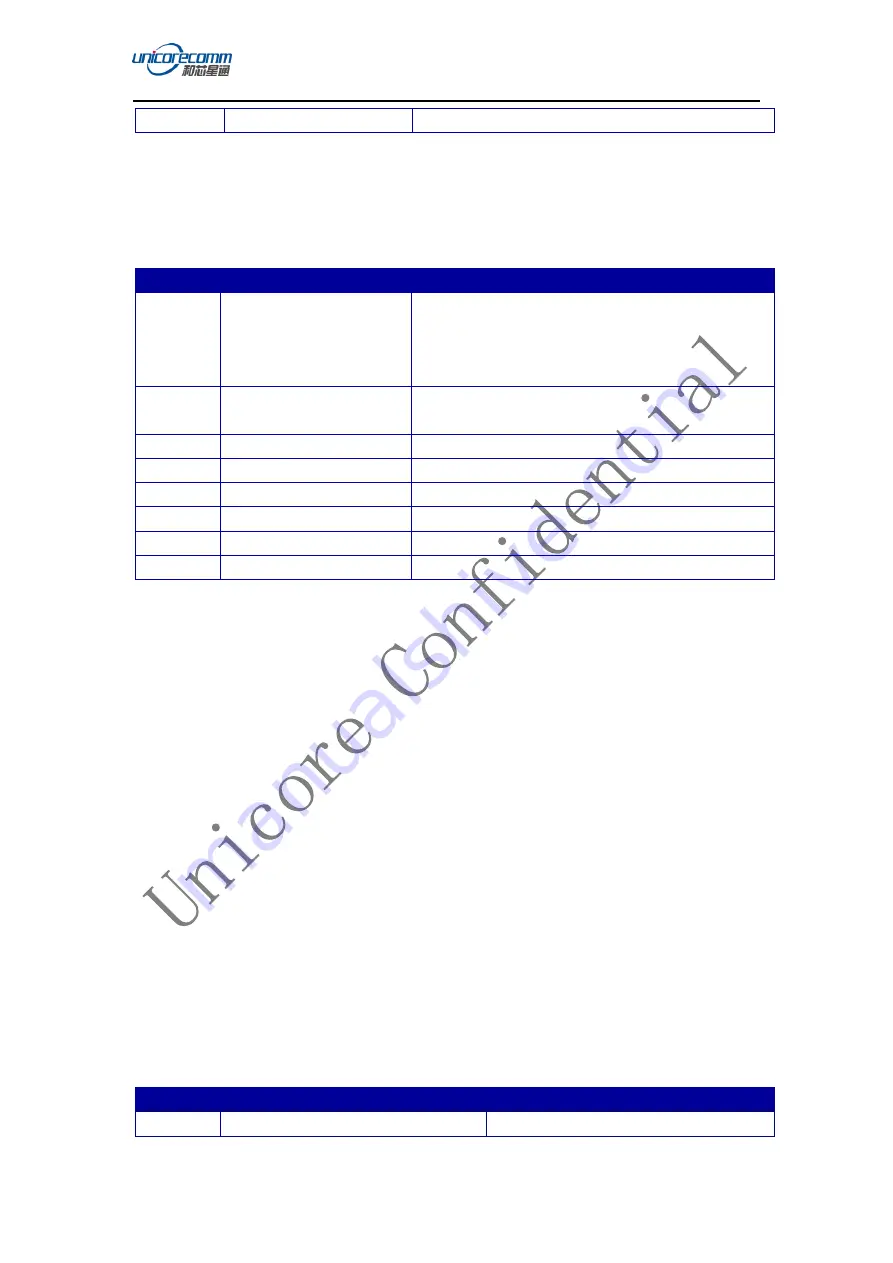
instructions required to enter and save at the base station:
Table 1-3: Self-Optimizing Base Station Configuration
Number
Command
Description
1
mode base time 60 1.5 2.5
Base station receiver positioning results within 60
seconds, or accuracy satisfies horizontal less than
1.5m and elevation less than 2.5m, average the
results and fix them as the base station coordinate
2
rtcm1006 com2 10
Base station antenna coordinate (antenna height
included)
3
rtcm1033 com2 10
Receiver and antenna description
4
rtcm1074 com2 1
GPS system correction data
5
rtcm1124 com2 1
BDS system correction data
6
rtcm1084 com2 1
Glonass system correction data
7
rtcm1094 com2 1
Galileo system correction data
8
saveconfig
Save configuration
1.2.
Rover Station Configuration
The RTK Rover Station receives the real-time differential correction data sent by
the base station. Rover receiver can adaptively recognize the RTCM data format;
simultaneously receive the satellite signal to perform RTK solution, to realize the RTK
high precision positioning. Frequently used commands for RTK rover station is:
MODE ROVER
GPGGA 1
SAVECONFIG
1.3.
Moving Base Configuration
Moving base station is different from fixed base station. Fixed base station is a
fixed point with known precise cooridinates, while the moving base station is at
moving status, the received satellite information is sent to the rover station receiver
(the undetermined point) in RTCM protocol. While receiving the satellite observations,
the rover station receiver also receives the moving base station information,
calculates the relative position of the rover station. Frequently commands used to
configure the moving base station are as follows:
Table 1-4: Moving Base Station Configuration
Number
Command
Description
1
mode movingbase
Set base station in movingbase mode







































































