





























UI Robot Technology Co. Ltd.
M4220170607EN
Page 41
Miniature Integrated Stepper Motor Controller(
Closed-loop
)
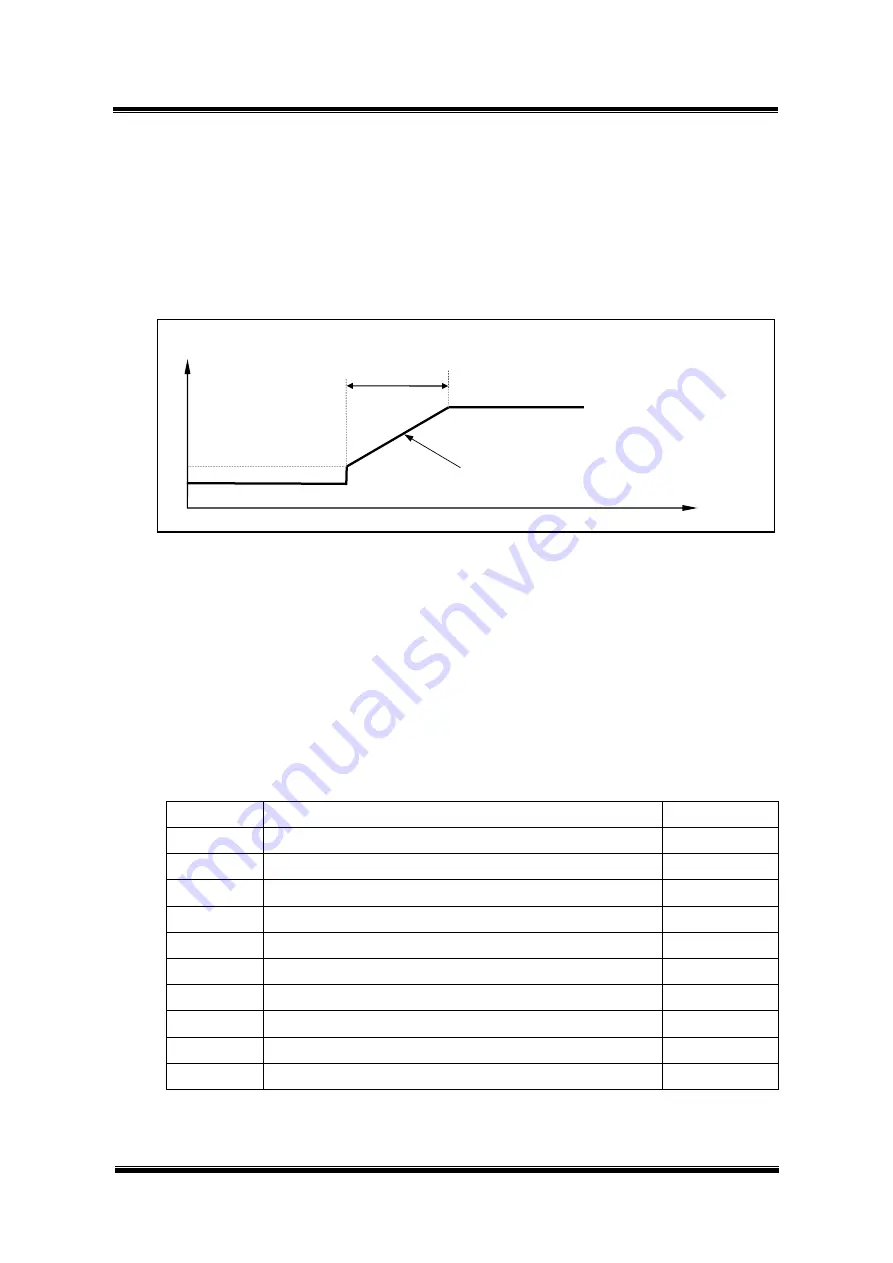
Max starting speed and max cessation speed has been described in front section. The unit
of MMS and MMD are pps.
In addition, notice that, if you want to store the value of set acceleration, deceleration,
maximum start speed and maximum instantaneous stopping speed in the EEPROM, you
need to send an instruction STO0; after sending the above instructions. Otherwise, after
power failure and restarted, the parameter values will be restored to the factory value. In
addition, the instruction STO0; affects the real-time performance of the control. See the
Chapter 11.0 for details for more details.
Figure7-12: Two modes to Set the of Acceleration Rate
7.9 Enable/disable Advanced Motion Control Module (MCFG)
Advanced Motion Control Module can be enabled or disabled by setting the CM bit of
MCFG (MCFG<10>). Setting the CM bit (MCFG<CM>=1) will enable the module and
clearing the CM bit (MCFG<CM>=0) will disable the advanced motion control module. (For
details of setting, please refer to Section 5.4 Master Configuration Register.) Meanwhile,
the AM and DM bit of MCFG also defines the input methods of acceleration/deceleration.
7.10 Instruction List
The following table shows the instructions mentioned in this chapter, the detail of those
instructions is descriped at the end of the document.
Instruction Description
Page
BLC
;
Set backlash compensation value η
64
BLC;
Check backlash compensation value
65
MAC
;
Set acceleration rate η
75
MAC;
Check acceleration rate
76
MDE
;
Set deceleration rate η
80
MDE;
Check deceleration rate
81
MMD
;
Set maximum cessation speed η
83
MMD;
Check maximum cessation speed
84
MMS
;
Set maximum starting speed η
85
MMS;
Check maximum starting speed
86
T
(时间)
Speed
Desired Speed
Max. Start Speed
(
1
)
Acc. Period
(
2
)
Acc. Rate (Slope)
Current Speed






































































