





























WSHP-SVX13C-EN
49
Sequence of Operation
During normal operation, the compressor and supply fan
outputs modulate to maintain the space temperature at
the user-selected space temperature setpoint(s).
Functions other than heating and cooling that are
controlled by the variable-speed WSHP UC400 controller
are described in this section.
Random Start Timer
At power-up, the UC400 controller will generate a random
timer (unique to each controller) from 5–30 seconds.
During this time period, all unit functionality will be held
off until the timer expires.
Maintenance Timer
The UC400 controller will compare the amount of fan run
time against an adjustable filter runtime hours setpoint
(stored in the controller) to determine when maintenance
is recommended for the unit (check the filter status and
other routine maintenance items as necessary).The filter
runtime hours setpoint can be user-edited as required
through the Tracer™ TU service tool. The valid range for
the filter runtime hours setpoint is 0 to 10000 hours and
the default value is 600 hours. If the user selects a setpoint
of 0, the filter change required diagnostic is disabled.
Once the filter runtime hours setpoint has been exceeded,
the controller generates a filter change required
diagnostic. The user will be notified of this diagnostic in
building automation system applications or through
Tracer™ TU.
The filter change required diagnostic is cleared whenever
a filter timer reset request is communicated to the
controller and the fan run hours has exceeded the fan run
hours limit. At that point, the fan run time is reset (to zero)
and the process starts over.
Setpoint Arbitration
Variable-speed WSHP units will require traditional zone
heating and cooling setpoints. These setpoints will be
available locally through the UC400 or may be provided
from a BAS.
The UC400 has provisions for a local zone setpoint input
with a range of 50-85°F which will be used in conjunction
with the occupied and standby offsets (Default 1.5°F and
7.5°F, respectively).The local occupied zone setpoints will
be calculated as follows depending on the occupancy
status of the unit:
Cooling Setpoint = Space Temp Setpoint D
(Occupied Offset or Standby Offset)
Heating Setpoint = Space Temp Setpoint Default—
(Occupied Offset or Standby Offset)
For unoccupied zone setpoints, the UC400 has default
values for heating and cooling and they are adjustable
through Tracer™ TU.
When multiple setpoint sources are available (local and
BAS), the controller will use the following logic for
determining which setpoint should be used for active
control:
1.
If a valid communicated setpoint value is present, the
communicated value will be used for control.
2. If a valid communicated setpoint value is not present
but a valid hard-wired setpoint value is present, the
hard-wired value will be used for control.
3. If neither valid communicated or hard-wired setpoint
values are present, the controller will use the default
setpoints.
Sensor Arbitration
The following sensor values can be provided to the UC400
via hard-wired inputs or through BACnet communication.
The controller will use a valid communicated value for unit
control, regardless of the status of the hard-wired input.
•
Space Temperature
•
Entering Water Temperature
•
Space Humidity
Occupancy Determination
The following standard occupancy modes and arbitration
are supported in the VSPD WSHP UC400:
Occupied mode
When the controller is in occupied mode, the unit will
attempt to maintain the space temperature to the active
occupied heating or cooling setpoint. Occupied mode is
the default mode of the UC400 controller.
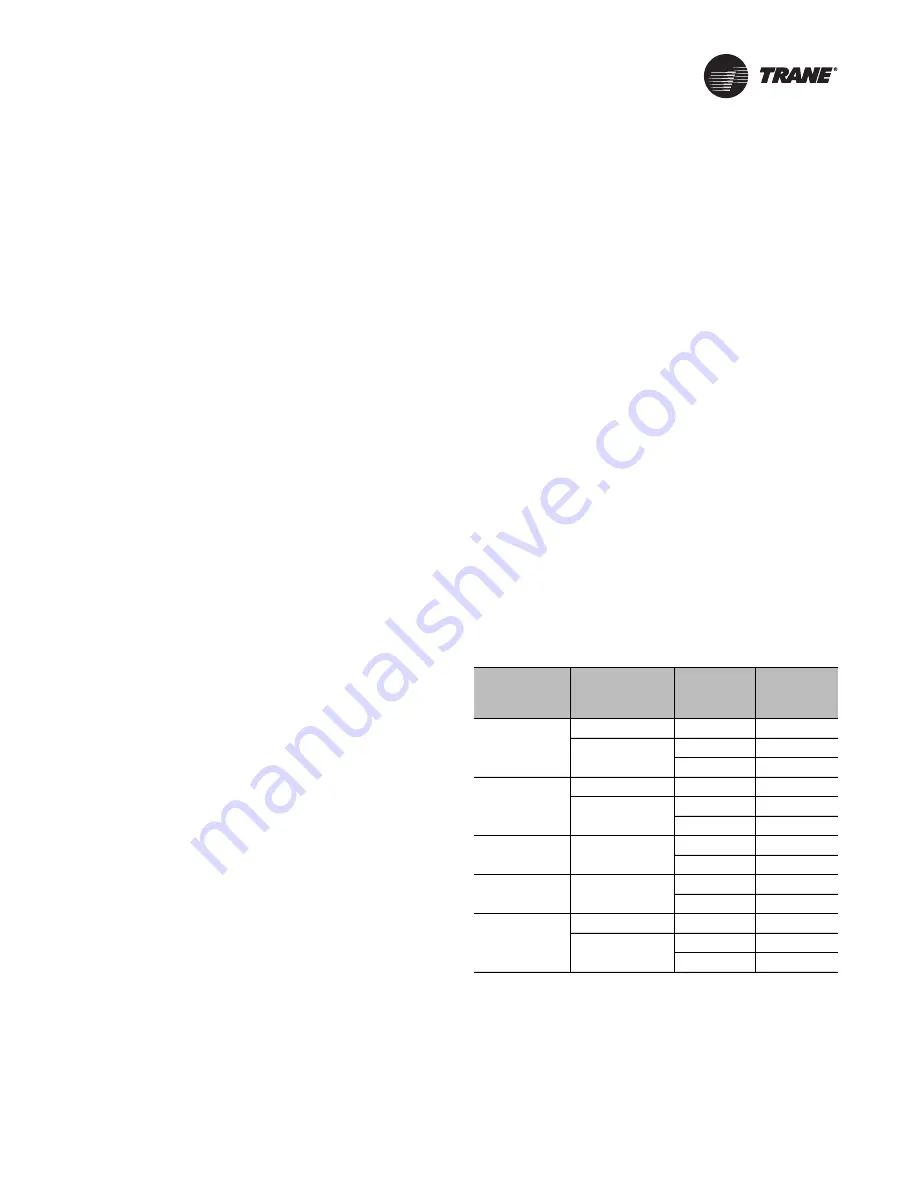
MSV
occupancy
request
(a)
(a) MSV occupancy request is a communicated Occupancy Mode request
from a BAS.
Local
occupancy
input
Bypass
timer
MSV
occupancy
status
Occupied
Occupied
N/A
Occupied
Unoccupied
Zero
Standby
Not zero
Bypass
Bypass
Occupied
N/A
Occupied
Unoccupied
Zero
Standby
Not zero
Bypass
Unoccupied
N/A
Zero
Unoccupied
Not zero
Bypass
Standby
N/A
Zero
Standby
Not zero
Bypass
Auto
Occupied
N/A
Occupied
Unoccupied
Zero
Unoccupied
Not zero
Bypass







































































