





























4-39
06-07 : Slip compensation gain (vector)
Performance : If the motor load appears too large, increase slip compensation.
(load current) (compensation gain)
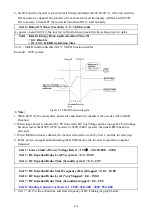
• Torque/Speed curve pattern :
• Operating frequency range : 0~motor rated frequency.
• When the motor output rotation speed is too low increase 06-07 setting value.
• When the motor is erratic or vibrates, decrease 06-07 setting value.
• The max. output rotation speed limit to the motor max. setting frequency.
• If increase 06-07 setting value then the output current is too large. Increase 06-05 setting value at
the same time.
06-11
:
Low frequency voltage compensation
Performance : During low frequency
Increase 06-11 setting value to increase output voltage and low frequency torque.
Decrease 06-11 setting value to decrease output voltage and low frequency torque.
• Output voltage/frequency curve pattern :
• Operating frequency range : 0~12HZ / 60HZ 0~10HZ / 50HZ
• During low frequency use :
When the motor output torque is insufficient, increase 06-07 setting value.
When the motor is vibrating excessively, decrease 06-07 setting value.
06-07
V
F
Δ
F
slip
≒
I
Gain
Figure 4-24 Slip Compensation
Figure 4-25 Low Frequency Voltage Compensation
Δ
F
slip
Torque
Q
RPM
A B
A: before slip compensation
B: after slip compensation







































































