





























STOBER
9 | Looking for more information about EtherCAT?
02/2020 | ID 443025.06
67
9.5.2.2
TwinCAT 3: Synchronization using DC-Sync
The event for one synchronization is referred to as the SYNC 0 signal in Beckhoff TwinCAT 3. Each slave generates it own SYNC 0 signal cyclically using the respective SyncManager.
9.5.2.2.1
DC settings
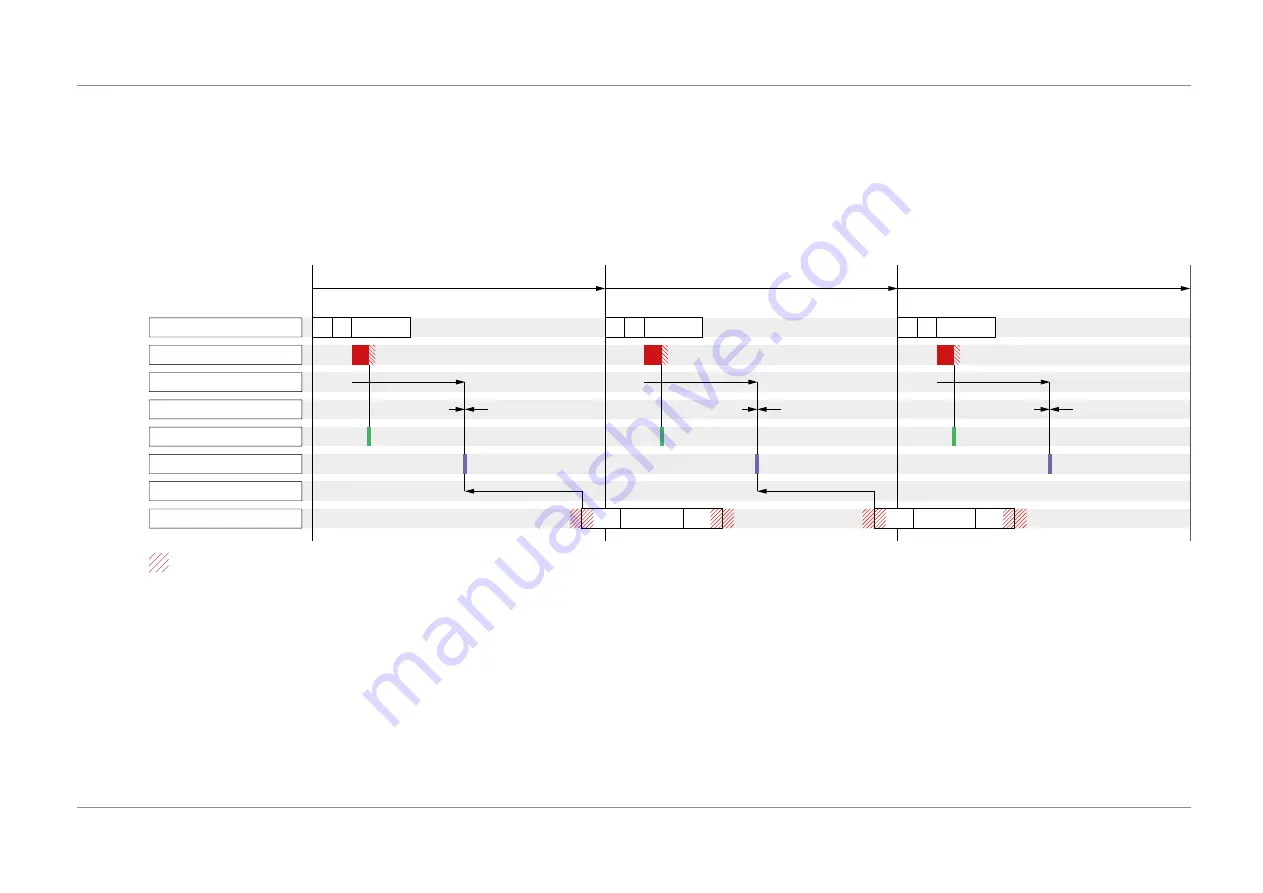
The following graphic shows stable synchronization using distributed clocks when using TwinCAT 3. Both the utilization of the control as well as the set times show a stable system, since the
frame jitter (controller) and application jitter (drive controller) are separated from each other.
O
I
1
3
2
I
O
O
I
1
3
2
I
O
O
I
1
2
Beckhoff CX2030
Frame
SYNC Shift Time
Shift Time User Defined
Data ready
SYNC 0
PLL phase offset
AR1
Cycle time
Cycle time
Cycle time
NC+PLC
NC+PLC
NC+PLC
APP
APP
= Jitter
Fig. 17: TwinCAT 3: DC-Sync – Settings
In the example, the data transmission (I/O) of the controller is set to task begin in the EtherCAT configuration. For the application cycle sequence, the order is defined as RxPDO, graphical
programming, TxPDO (A149 = 0).





















































