





























TAKEDO - 3VF NXP USER MANUAL Release P09.1 dated 01-12-2017
31
9 – CLOSED LOOP ADJUSTMENTS
1 - For closed loop, main important parameters are: Motor RPM P2.1.4, Motor magnetizing current
P2.5.4.1. If these value are available put them in the inverter parameters. If they are not available or you
are not sure of the value on motor plate, inverter can automatically learn these parameter and set them
automatically. To do this follows the line hereunder.
Car at topmost floor, elevator balanced according to plan, set parameter P2.1.5 Inverter nominal
current, with empty car and lift working in closed loop, do the following:
RPM reading-
Set parameter P2.2.23 = Yes, make a call in down direction (inverter must reach full
speed), inverter reads Motor RPM and write the value in P2.1.4.
Mag. current reading-
Set parameter P2.2.24 = Yes, make a call in up direction (inverter must reach
full speed), inverter reads Motor Magnetizing current and write the value in P2.5.4.1
2 - Adjust
starting
comfort with the following parameters :
JERK
BACK ROTATION
2.2.21.3
Initial acceleration ramp
--
2.2.21.4
Hz time at start (about 0.7”)
2.3.2.6.1
Brake open delay (min. 0.5”)
2.5.4.9.7 RollBack Control Gain --
Starting comfort has to be ‘soft’, with no jerks or vibrations, or roll back.
Check the RollBack Control Gain (P2.5.4.9.7 and 8) (generally, the default value works very well).
3 - If during the
acceleration
or during high speed travel motor has vibrations, check the parameters :
2.5.4.6
Speed control KP2
2.5.4.7
Speed Control TI2
Check also that the encoder connections have been made as indicated in paragraphs 3.2.8 and 10.
The
encoder cable must be separated from the power cable and distant 50 cm at least from the motor
cable. It should be connected with a single cable, with no added terminals, and with the shield
connected to earth at the inverter side.
Encoder pulses per revolution must match the relative
parameter of the Encoder Board. Check that parameter P7.3.1.3 is set to 5ms for incremental encoder
(NXOPTA4/A5) and that there is a good mechanical coupling between encoder and the fast motor shaft
(joint, alignment, tight screws etc.)
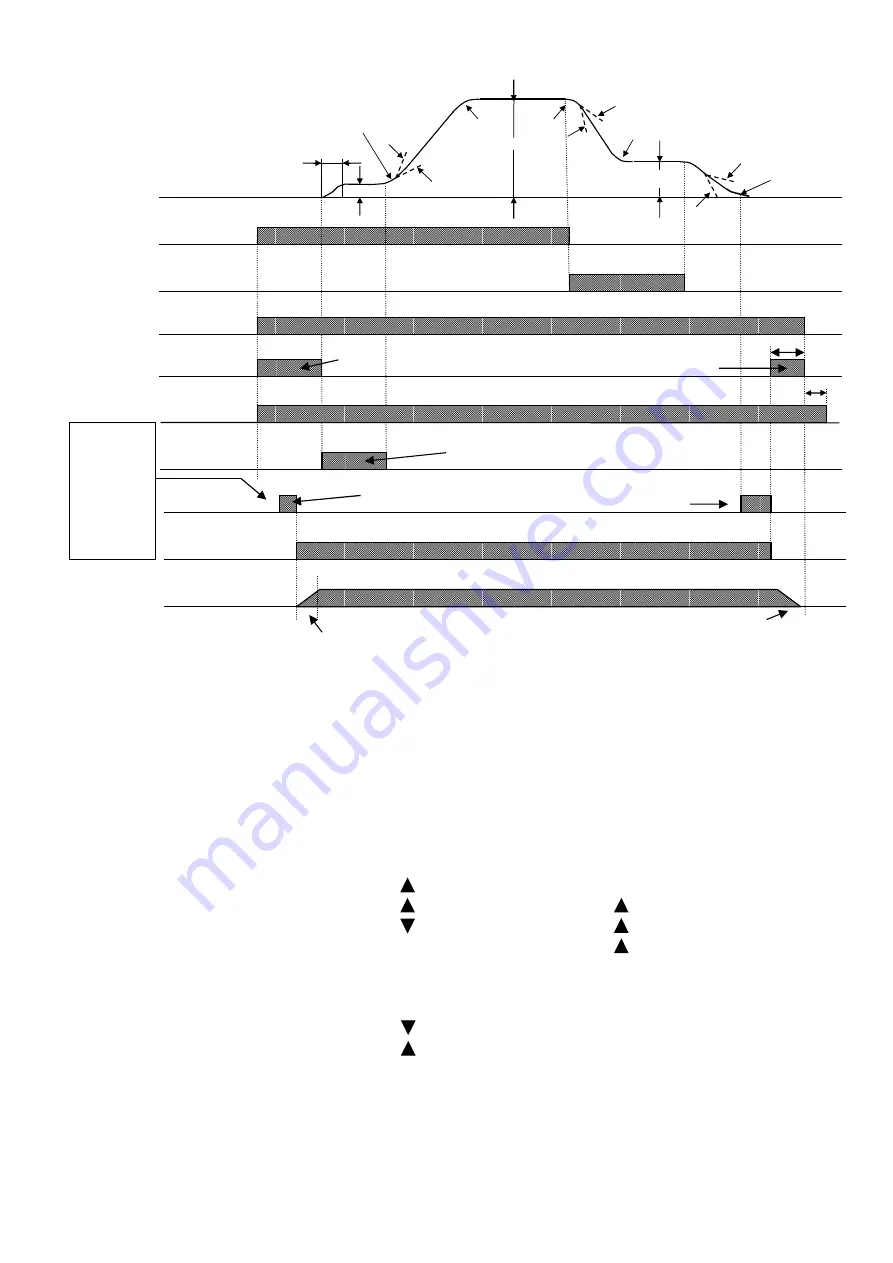
0.4s
SPEED
PROFILE
HIGH SPEED
COMMAND - terminal 14
LOW SPEED
COMMAND - terminal 15
2.2.4
2.2.5
2.2.16
STOP AT
STATIC
POSITION
TIME
AT START 2.2.21.4
2.2.3
2.2.7
2.2.14
2.2.21.3
2.2.15
2.2.17
SMOOTH START TIME
2.3.1.6
SAFETY BRAKE
CONTROL DELAY
BRAKE OPENING DELAY AT
START 2.3.2.6.1
BRAKE CLOSING DELAY
AT STOP 2.3.2.5
SMOOTH START
FREQUENCY
SAFETY BRAKE
CONTROL
MECHANICAL
BRAKE
MECHANICAL DELAY
BRAKE OPENING
MECHANICAL DELAY
BRAKE CLOSING
When
parameter
2.3.2. is
matched
the brake
open delay
starts.
2.2.21.2
2.3.2.4
0.4s
TIME
AT ARRIVAL 2.2.21.5
DIRECTION
COMMAND - terminals
8/9
MOTOR
CONTACTORS
2.2.8
Summary of Contents for TAKEDO-3VF
Page 8: ...TAKEDO 3VF NXP USER MANUAL Release P09 1 dated 01 12 2017 8 INTENTIONALLY BLANK PAGE ...
Page 28: ...TAKEDO 3VF NXP USER MANUAL Release P09 1 dated 01 12 2017 28 ASYNCHRONOUS MOTORS CLOSED LOOP ...
Page 50: ...TAKEDO 3VF NXP USER MANUAL Release P09 1 dated 01 12 2017 50 ...
Page 58: ...TAKEDO 3VF NXP Attachment for A3 Amendment Version 03 1 dated 01 12 17 8 ...
Page 59: ...TAKEDO 3VF NXP Attachment for A3 Amendment Version 03 1 dated 01 12 17 9 ...







































































