SICK NAV-LOC, Operating Instructions Manual
Introducing the SICK NAV-LOC – revolutionize your navigation experience! Access the comprehensive Operating Instructions Manual for this cutting-edge device, available for free download at manualshive.com. This essential manual equips users with step-by-step instructions and crucial information, ensuring seamless operations and optimal performance of the SICK NAV-LOC.
Share
Download

















Reviews:
No comments
Related manuals for NAV-LOC

2002
Brand: Keithley Pages: 148

DS 150
Brand: PAT Pages: 55

DS 150
Brand: PAT Pages: 31

306
Brand: 2B Technologies Pages: 4

MX-50
Brand: A&D Pages: 39

E4500
Brand: E Instruments Pages: 144

EC3840
Brand: JENCO Pages: 13

G 1690
Brand: GREISINGER Pages: 20

PCB+
Brand: BD Sensors Pages: 4

DP-900
Brand: Roland Pages: 2

JPSL-5L
Brand: Karman Pages: 2

SENSITRON SMART S
Brand: Halma Pages: 12
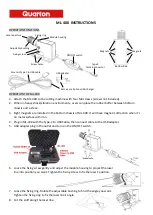
ML-400
Brand: Quarton Pages: 2

LAQUA F-74BW
Brand: Horiba Scientific Pages: 2

6-120
Brand: SensorLink Pages: 12

IEM-100 Beltpack
Brand: DAPAudio Pages: 17

3000ZA
Brand: Teledyne Pages: 81

PVH2365
Brand: POSEIDON Pages: 13





















































