





























NOTE
It is not possible to use the Node Guarding protocol and the Heartbeat protocol on
one node. If the Heartbeat Time parameter in the object 1017h is not equal to 0
, the Heartbeat protocol is used.
Node guarding
The status of the encoder is checked at regular intervals using the Node Guarding
telegram. The encoder responds within the response time configured in the objects
100Ch and 100Dh
.
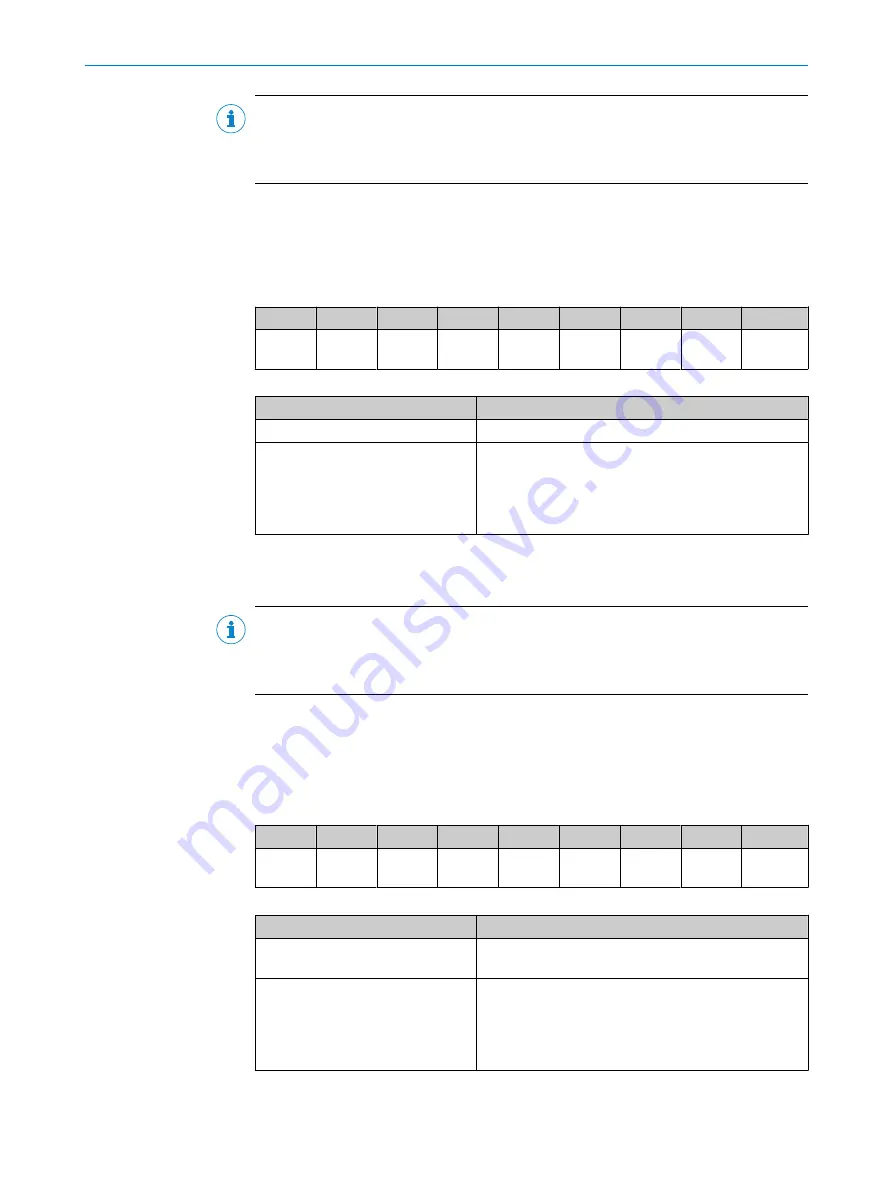
Table 24: Format of the Node Guarding telegram
COB-ID
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
700h +
Node-ID
Status
00h
00h
00h
00h
00h
00h
00h
Table 25: Meaning of byte 0
Byte 0, status
Parameter
Bit 7
0
Bit 6 ... 0
Operating status of the encoder:
127 = Pre-operational
5 = Operational
4 = Stopped
0 = boot up
Example for an encoder in the Operational status:
•
85h, 05h, 85h = no error
•
85h, 05h, 05h = error
NOTE
If node guarding is active, the encoder expects a corresponding status request from the
NMT master within a specific interval. If this is not the case, the slave changes to the
Preoperational status.
Heartbeat
If the Heartbeat telegram is used, the encoder sends its status autonomously at regular
intervals. This status can be monitored by any other user in the network.
The heartbeat time is configured using object 1017h
Table 26: Format of the Heartbeat telegram
COB-ID
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
700h +
Node-ID
Status
00h
00h
00h
00h
00h
00h
00h
Table 27: Meaning of byte 0
Byte 0, status
Parameter
Bit 7
Toggle bit
The bit changes its value after each request.
Bit 6 ... 0
Operating status of the encoder:
127 = Preoperational
5 = Operational
4 = Stopped
0 = Boot up
5
INTEGRATION IN CANOPEN
28
O P E R A T I N G I N S T R U C T I O N S | AHS/AHM36 CANopen
AHS/AHM36 CANopen Inox
8016869/1EF3/2021-12-08 | SICK
Subject to change without notice







































































