





























If the touch probe is enabled, this object provides a counter of the detected falling edges of the
touch probe 1. The counter is cleared when the Touch Probe Function Object 0x60B8 disables the
probe.
Attribute
Value
Name
Touch Probe 1 Negative Edge Counter
Index
0x60D6
Subindex
0x00
Type
UNSIGNED16
Access
RO
Default Value
0x0000
Value range
-
-
Table 9-115 Touch Probe 1 Negative Edge Counter
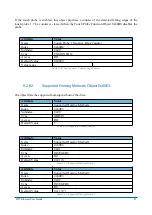
9.2.62
Supported Homing Methods Object 0x60E3
The object lists the supported homing method of the drive.
Attribute
Value
Name
Supported Homing Methods
Index
0x60E3
Subindex
0x00
Type
ARRAY
Access
RO
Default Value
3
Table 9-116 Supported Homing Methods
Attribute
Value
Name
Supported Homing Method 1
Index
0x60E3
Subindex
0x01
Type
INTEGER8
Access
R0
Default Value
0x01 (1)
Table 9-117 Supported Homing Method 1
Attribute
Value
Name
Supported Homing Method 2
Index
0x60E3
Subindex
0x02
Type
INTEGER8
Access
R0
Default Value
0x11 (17)
Table 9-118 Supported Homing Method 2
HT7 Ethercat User Guide
53
Summary of Contents for EtherCAT HT7
Page 76: ...www shsitalia it info shsbox shsitalia it 15 ...
Page 91: ...www shsitalia it info shsbox shsitalia it 2 5 Digital Inputs 2 6 Digital Outputs 14 ...
Page 92: ...www shsitalia it info shsbox shsitalia it 2 7 Encoder Inputs 15 ...
Page 95: ...www shsitalia it info shsbox shsitalia it 18 ...
Page 110: ...www shsitalia it info shsbox shsitalia it 2 5 Digital Inputs 2 6 Digital Outputs 14 ...
Page 111: ...www shsitalia it info shsbox shsitalia it 2 7 Encoder Inputs 15 ...
Page 124: ...www shsitalia it info shsbox shsitalia it 28 ...







































































