


























Start-up
22
03.00 | MEG 50 EC | Assembly and Operating Manual | en | 389201
5 Start-up
5.1 Notes on start-up
The control cable must be de-energized when connecting to the
gripper.
The workpiece to be gripped should then be gripped in "live
movement" mode.
The current at the input "Analog input: steps" (terminal 23) must
correspond to the distance from the current position to the
position which you wish to use for pre-positioning. Resulting from
a rising edge on the inputs "Gripper open" or "Gripper closed", the
gripper moves inwards or outwards by the distance set.
Monitoring of the output "Target pos. reached".
Prepositioning reached - output issues high signal.
The gripper is prepositioned in "positioning movement" mode,
then the workpiece is gripped in live movement. The gripper can
be prepositioned accordingly and the gripping cycle can start
anew.
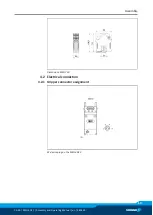
5.2 MEG 50 EC and MEG C 50 connection description
The MEG 50 EC does one stroke of 8 mm per jaw.
Stroke, force and speed can be set on the external MEG C
controller via analog inputs or potentiometers. Gripper
functionalities such as opening, closing and reference run are
specified via decoupled digital inputs on the MEG C controller.
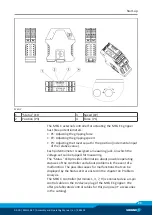
Status signals of the MEG C external controller are sent back to the
superordinate control (e.g. PLC) via digital outputs. The current
position is issued as analog value.







































































