





























PY Manual
Copyright © 2006 SANYO DENKI
AMERICA
, Inc.
57
Stop Sequences
During normal operation, bus power (
R
,
S
, and
T
) may be removed from the amplifier
without removing the control power (
r
and
t
). For example, this may be done to create a
safe environment so the operator may remove a product sample mid-process for quality
control or to clear a product jam. Since control power is not removed, the position of the
motor continues to be tracked and alarm information remains available.
Notes:
1.
Release the “interlock” before inputting the “start ready” input.
2.
This value can be changed to 0mS by setting the “Holding Brake Excitation Timing”
to “0” (Mode 1, Page 13). The current is limited by the sequence current limit value
for 300mS. The default value for the sequence current limit (SILM) is 120%. It may
be change in Mode 1, Page 12.
3.
It is possible to force the command to 0 for 300mS after Servo “ON” (SON) by
setting ZCLP. When in position mode, the command pulses continue to affect the
deviation for 300mS. It is possible to make the command effective immediately
after Servo ON (SON) by setting INH
4.
If an interlock condition occurs while moving a heavy load a Bus Circuit Power
Error (MPE) alarm may occur.
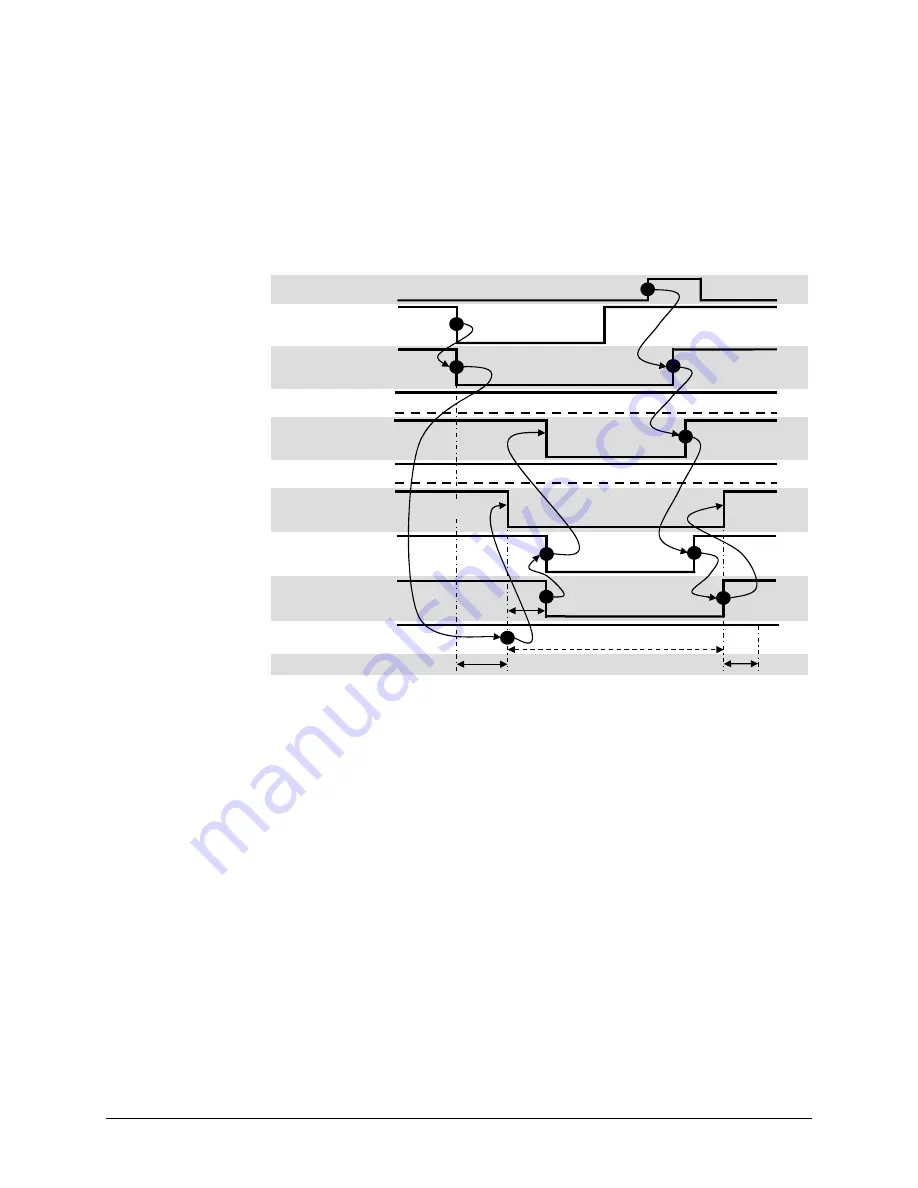
Stop and
recovery due to
loss of bus power
(interlock)
Start Ready ON (external switch)
Interlock
Main Circuit Power Supply (R,S,T)
Dynamic Brake
Holding Brake Excitation
Timing Output (HBON)
Start Ready Complete
Output (SRDY)
Motor Excitation
Contact Open
Amplifier Ready Output (RDY)
On
Off
On
Off
On (Operating)
Servo ON (SON)
Command
On (Release)
On
On
Approximately
50 msec
300 msec
300 msec
Command is Ineffective (Forced to Zero)
Off (Brake Engaged)
¦
§
¨
§
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































