




























Input and Output Signals
Publication PUB088-005-00_1017
37 of 84
F
ou
nd
ati
on
F
iel
db
us
FF
-01
In
s
tal
lat
io
n m
an
u
al
5.1.1
Controls Priority
Since there are three potential sources for control inputs the actuator and Profibus DP Module (Mk2)
assign a priority for those occasions when two or more commands are applied simultaneously.
IQ / IQT, Skil/EH controls priority
Local controls go direct to the main board and override any Profibus controls and any hard-wired
controls except hard-wired ESD. An actuator that has Local selected cannot be controlled over the
Profibus network.
In addition, for the IQ / IQT and Skil/EH actuators, the remote control hard-wired inputs can be used
as discrete input signals, to report the status of other devices or as control inputs. The associated
Auxiliary Input Mask parameter must be set for the IQ / IQT and Skil/EH to select the required function.
When selected for control, the hard-wired inputs take priority over the Profibus controls, but are
subordinate to the local controls (except for ESD). If there is a Profibus command still present when a
Local or Hard-wired command is removed, the Profibus command will re-assert itself.
In the case of the hard-wired input for ESD, this can be configured either as an ESD/HW_DI-4 signal
or as a ‘Profibus Command Inhibit’ to prevent network control signals from moving the actuator.
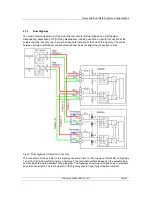
High Priority
Low Priority
Local Stop
Local Close
Hard-Wired Close
Profibus Close
Local Open
Hard-Wired Open
Profibus Open
Hard-Wired ESD
Hard-Wired Stop
Profibus Stop
Profibus ESD
Profibus Position
Profibus Part Stroke
Mechanically interlocked to prevent both at the same time
The IQ/IQT can be set so that Local Stop has a higher priority than ESD
Only one Profibus command is permitted at a time
If a Profibus command is applied whilst Hard-Wired Stop is present, stop is cancelled
Fig 27: IQ and IQT Controls Priorities
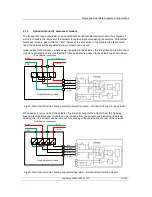
CVA controls priority
In the case of the CVA,
whilst the actuator is in the ‘RUN’ mode it is able to be commanded from the
field unit. When the actuator is in
the ‘STOP’ mode command is inhibited. Refer to the CVA manual
for more details. When
‘RUN’ is selected, control priorities are as indicated below. The actuator will
always respond to the last Open/Stop/Close input or DV command.
If the command is an ESD, then it will generally override any other command.
High Priority
Low Priority
ESD Close open stop positioning
Fig 28: CVA Controls Priorities







































































