FT 300 Force Torque Sensor - Instruction Manual
29
3.8. Installation for Universal Robots
The table below shows which Robotiq software to use with your version of Universal Robots’ controller. If you are using a CB3 or
CB3.1 controller, it is recommended to use the Force Torque Sensor URCaps Package.
Robotiq Software
Universal Robots' controller version
CB1
CB2
CB3
CB3.1
Legacy Driver Package (DFU-1.1.15)
(includes Gripper toolbar)
Incompatible
Compatible
Compatible
Compatible
ActiveDrive Toolbar (ADU-1.0.1)
Incompatible
Compatible
Compatible
Compatible
FT 300 Force Torque Sensor URCaps Package
up to 1.1.1 (includes ActiveDrive toolbar)
Incompatible
Incompatible
Compatible
Compatible
FT 300 Force Torque Sensor URCaps Package
1.2 (includes ActiveDrive toolbar)
Incompatible
Incompatible
Incompatible
Compatible
Refer to the appropriate section depending on your controller version:
l
The URCap Package section covers the installation of the Force Torque Sensor URCaps Package.
l
The UR Package without URCaps section goes through the software installation procedures when not using URCaps.
Info
The robot's PolyScope version must be 3.3 and higher in order to install the URCap.
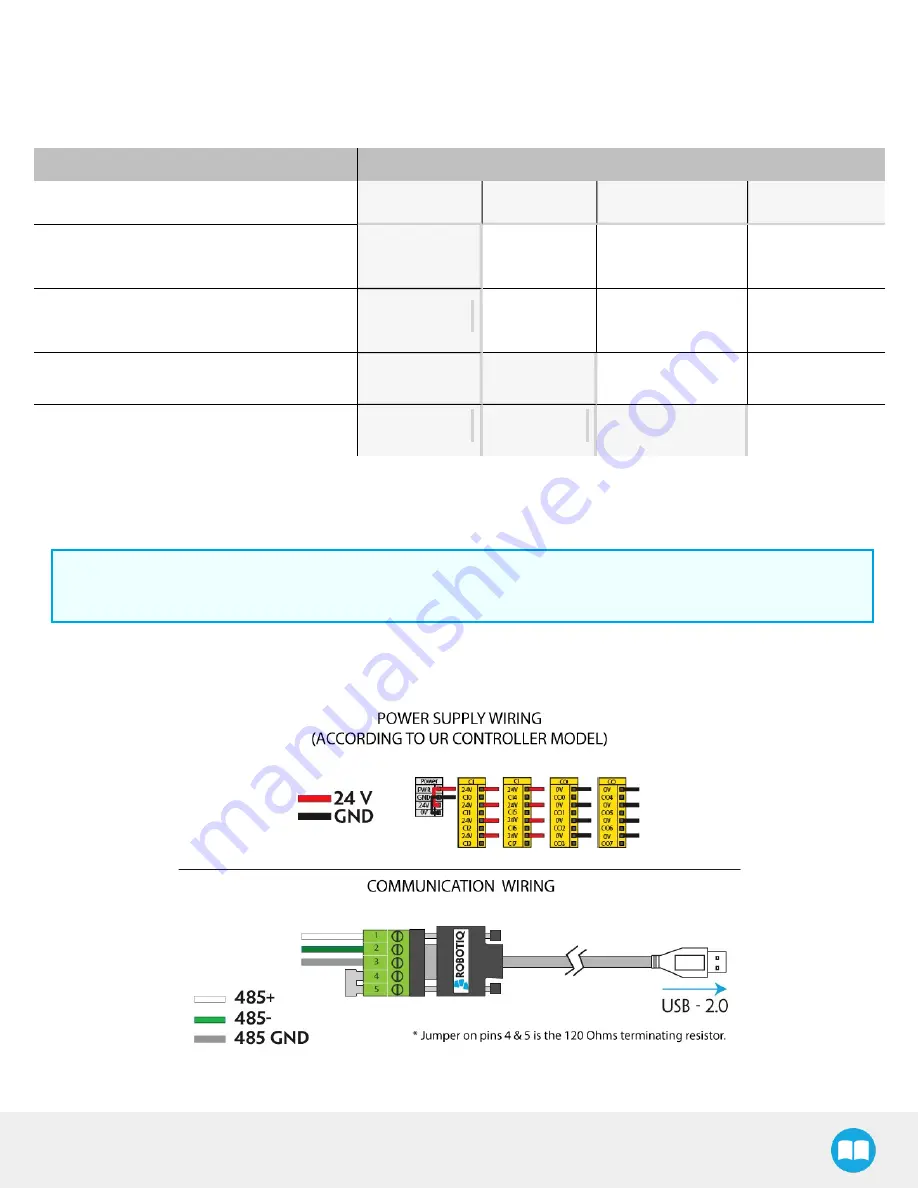
Prior to any software installation, connect the white, green and bare wires to the Robotiq RS-485 signal converter (ACC-ADT-
RS485-USB) as shown in the figure below. Also connect the red (24V) and black (0V) wires in the controller according to the figure
below.
Fig. 3.9: Force Torque Sensor wiring to Universal Robots’ controller.