




























87
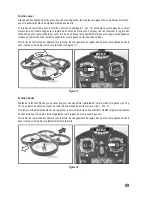
e) Étalonnage de la boussole
Le quadrirotor est équipé d‘une boussole qui permet de détecter son orientation et qu‘il utilise pour le vol en mode
Headless.
Le quadrirotor réalise automatiquement le calibrage pendant l’initialisation lors du raccordement de la batterie au
quadrirotor (voir 10. d).
Directement après le raccordement de la batterie, l’initialisation du quadrirotor tout comme le calibrage de
la boussole démarrent. Cette procédure dure env. 3 secondes.
Ne déplacez pas le QuadroCopter pendant ce temps !
Figure 9
Summary of Contents for Cyclone Multi
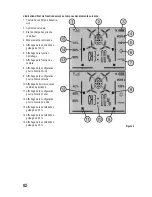
Page 10: ...10 8 Bedienelemente des Senders Ansicht Vorderseite Bild 1 ...
Page 44: ...44 8 Transmitter controls Front view Figure 1 ...
Page 78: ...78 8 Éléments de commande de l émetteur Vue de face Figure 1 ...
Page 112: ...112 8 Bedieningselementen van de afstandsbediening Vooraanzicht Afbeelding 1 ...
Page 138: ...138 ...
Page 139: ...139 ...







































































