





























17
12. Grundsätzliche Informationen zum Steuern von
Quadrocoptern
Bevor Sie Ihr Modell in Betrieb nehmen, sollten Sie zuerst die Ihnen zur Verfügung stehenden Steuermöglichkeiten
kennenlernen, um das Modell sicher kontrollieren zu können.
Der Quadrocopter wird mit Hilfe der beiden Steuerknüppel am Fernsteuersender kontrolliert. Dabei stehen Ihnen
folgende Funktionen zur Verfügung:
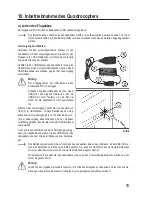
Pitch-Funktion
Mit Hilfe der Pitch-Funktion wird die Flughöhe eines Quadrocopters beeinflusst (siehe Bild 9). Die Steuerung erfolgt
mit dem linken Steuerknüppel (siehe auch Bild 1, Pos. 9). Dazu kann dieser nach vorne und hinten bewegt werden,
ohne dass er, wie bei den restlichen Steuerfunktionen, immer wieder in die Mittelstellung zurückfedert.
Wenn die Motoren per Fernsteuerbefehl gestartet wurden, laufen sie im Leerlauf. Wird der Steuerknüppel von der
untersten Stellung langsam nach vorne geschoben, erhöhen die Propeller entsprechend der Knüppelstellung die
Drehzahlen und der Quadrocopter hebt ab.
Befindet sich der Steuerknüppel in der Mittelstellung, sollten die Drehzahlen der Propeller so hoch sein, dass der
Quadrocopter schwebt. Wird der Steuerknüppel weiter nach vorne geschoben, steigt der Quadrocopter. Wenn der
Steuerknüppel zurückgezogen wird, sinkt der Quadrocopter.
Bild 9