





























Chapter 6 Command Reference - 85 -
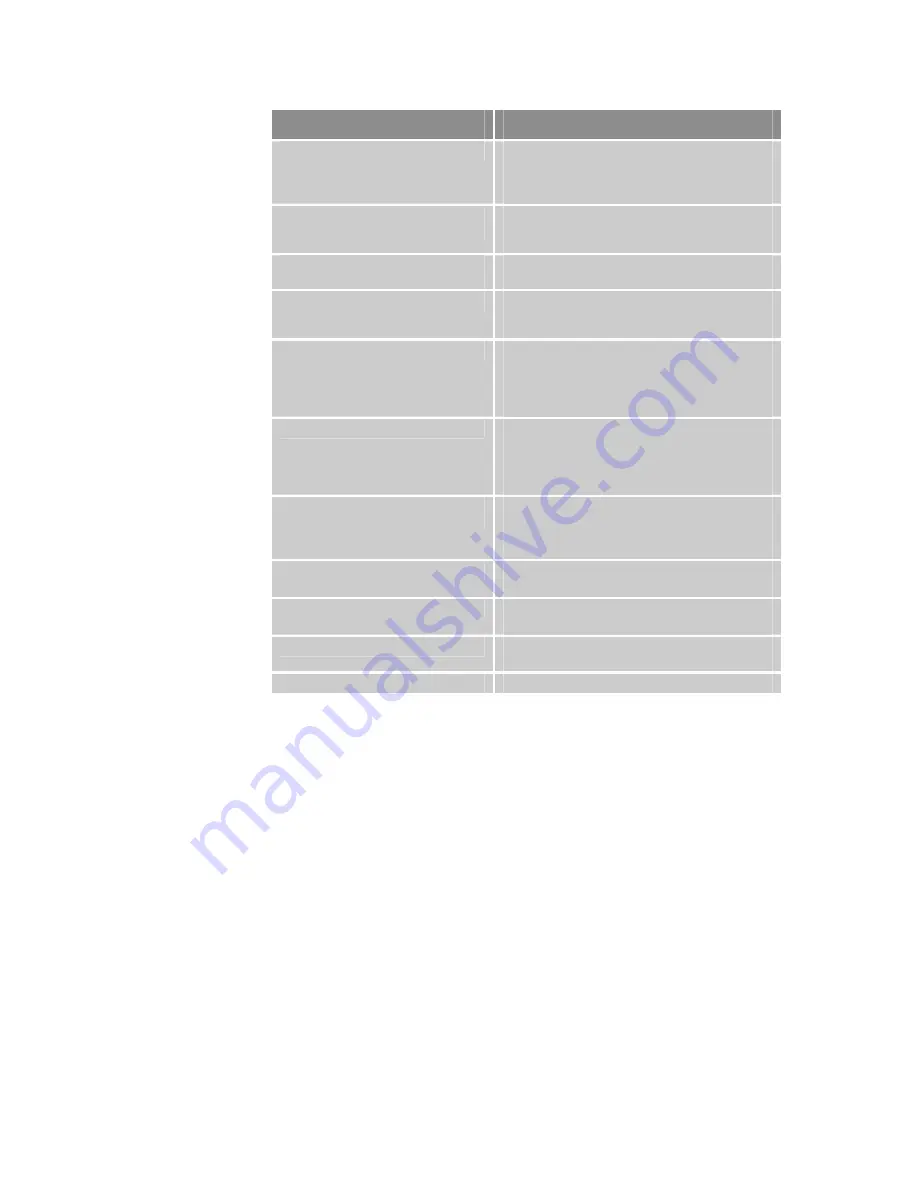
Error
Resolution
E9—Peak Current = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(
DMTIP
)
E1Ø—Use Drive Continuous
Current
The continuous current of the motor is higher than
the continuous current rating of the drive. Use the
continuous current rating for the drive.
E11—Torque Rating > Peak
Power Rating
The motor’s torque rating is too high for the power
level of the drive. Use the drive’s torque rating.
E12— Use Drive Peak Current
The peak current of the motor is higher than the
peak current rating of the drive. Use the drive’s
value for peak current.
E13 - Inertia = Ø
This parameter is set to zero (0). The drive will not
enable Velocity or Position Modes. To correct the
error, you must set to a non-zero value. Refer to
your motor specifications for the correct value.
(
DMTJ
)
E14 – Damping = Ø
This parameter is set to zero (0). The drive will not
enable Velocity or Position Modes. To correct the
error, you must set to a non-zero value. Refer to
your motor specifications for the correct value.
(
DMTD
)
E15 – Notch filter Calc
Error.
The notch filter settings caused an internal
calculation error. The last valid value was used.
Try different values for the notch filter parameters.
(
DNOTAF
,
DNOTAQ
,
DNOTBF
,
DNOTBQ
)
E16 – Lead < Lag Freq
The lead filter setting (
DNOTLD
) must be greater
than or equal to the lag filter setting. (
DNOTLG
)
E17 – Lead
≥
4* Lag Freq
The lead filter setting (
DNOTLD
) must be less than
or equal to 4 times the lag filter setting. (
DNOTLG
)
E18 – Lag Freq < 2Ø Hz
The lag filter setting (
DNOTLG
) must be greater
than or equal to 20 Hz.
E19–E24
RESERVED
Table 42 Configuration Errors and Warnings
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































