




















PD42-1270 TMCL
™
Firmware Manual • Firmware Version V1.00 | Document Revision V1.0 • 2017-Mar-02
6 / 91
2
First Steps with TMCL
In this chapter you can find some hints for your first steps with the PD42-1270 and TMCL. You may skip
this chapter if you are already familiar with TMCL and the TMCL-IDE.
Things that you will need
• Your PD42-1270 PANdrive™.
• A CAN adapter.
• A power supply (24V DC) for your PD42-1270 module.
• The TMCL-IDE 3.x already installed on your PC
2.1
Basic Setup
First of all, you will need a PC with Windows (at least Windows 7) and the TMCL-IDE 3.x installed on it. If
you do not have the TMCL-IDE installed on your PC then please download it from the TMCL-IDE product
page of Trinamic’s website (http://www.trinamic.com) and install it on your PC.
Please also ensure that your PD42-1270 is properly connected to your power supply and that the stepper
motor is properly connected to the module. Please see the PD42-1270 hardware manual for instructions
on how to do this.
Do not connect or disconnect a stepper motor to or from the module while the
module is powered!
Then, please start up the TMCL-IDE. After that you can connect your PD42-1270 via CAN and switch on the
power supply for the module (while the TMCL-IDE is running on your PC). The module will be recognized
by the TMCL-IDE, and necessary driver registrations in Windows will automatically done by the TMCL-IDE.
2.2
Using the TMCL Direct Mode
At first try to use some TMCL commands in direct mode. In the TMCL-IDE a tree view showing the PD42-
1270 and all tools available for it is displayed. Click on the Direct Mode entry of the tool tree. Now, the
Direct Mode tool will pop up.
In the Direct Mode tool you can choose a TMCL command, enter the necessary parameters and execute
the command.
2.3
Changing Axis Parameters
Next you can try changing some settings (also called axis parameters) using the SAP command in direct
mode. Choose the SAP command. Then choose the parameter type and the motor number. Last, enter
the desired value and click execute to execute the command which then changes the desired parameter.
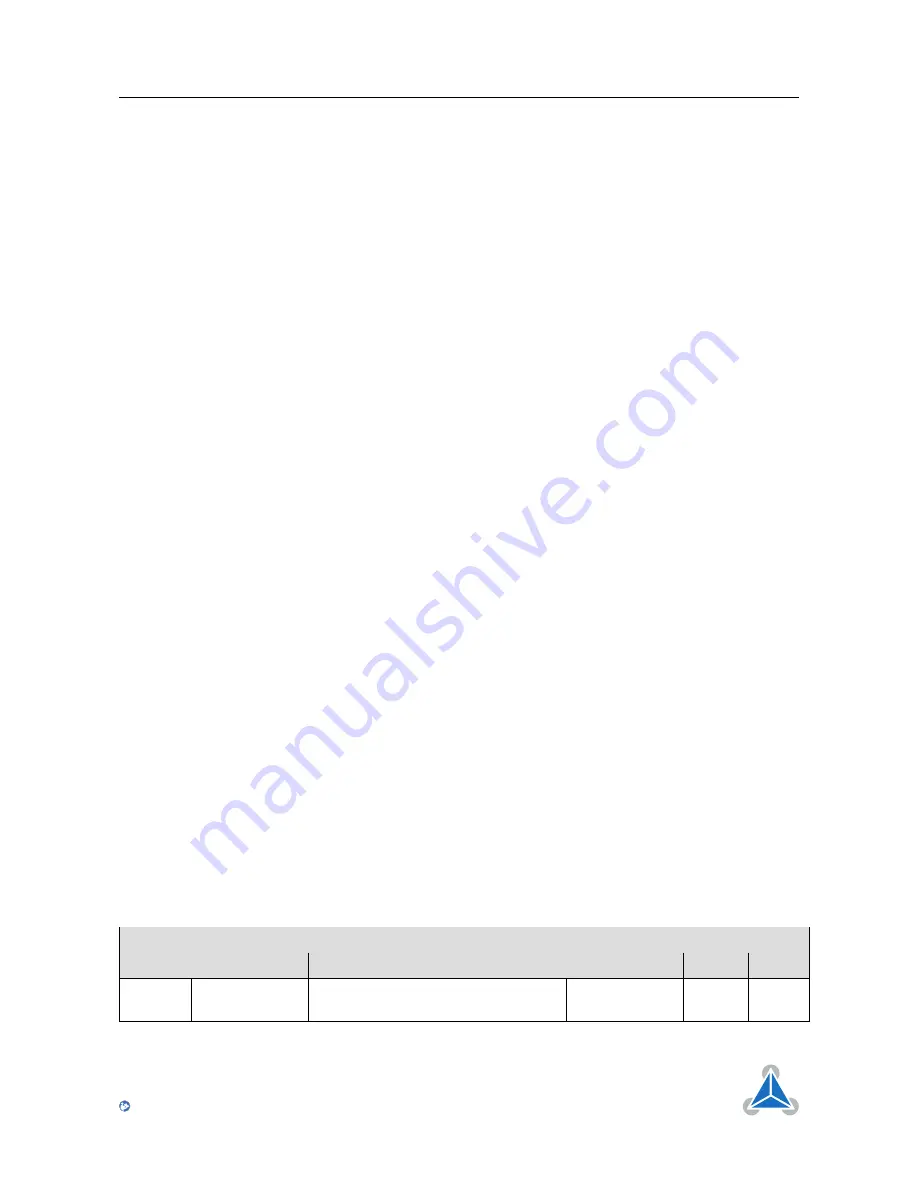
The following table points out the most important axis parameters. Please see chapter
4
for a complete
list of all axis parameters.
Most important axis parameters
Number
Axis Parameter
Description
Range [Units]
Default
Access
4
Maximum
speed
The maximum speed used for posi-
tioning ramps.
0
. . .
7999774
[pps]
150000
RWE
©2017 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at
www.trinamic.com
Read entire documentation.