





























3-8
3-8
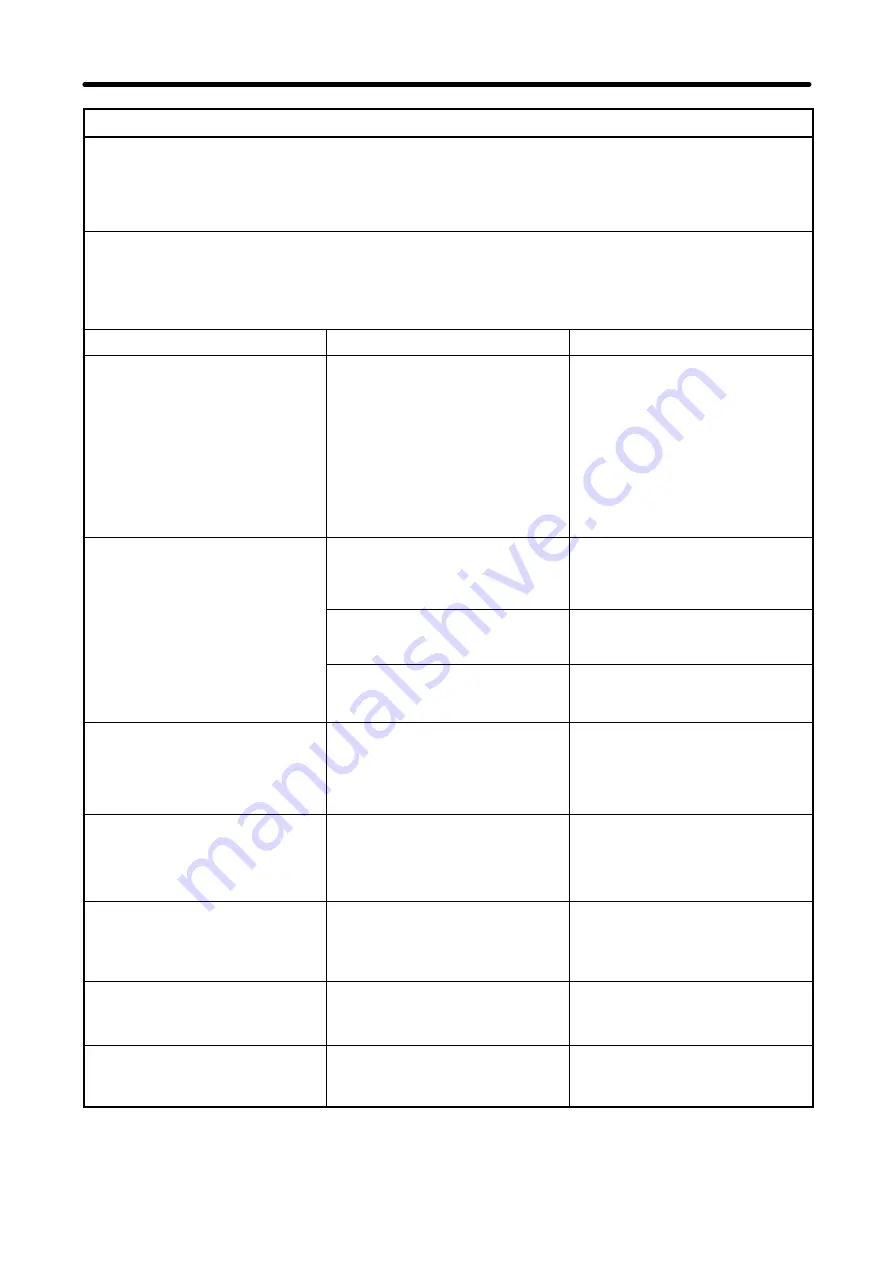
Overspeeding
·
An alarm will go off if the rotation speed of the motor is abnormal, as in the following cases:
The rotation speed has exceeded the maximum allowable rotation speed.
The rotation signal is not returned from the motor in response to a command from the Servo Driver.
A command is input for the motor to run at a speed exceeding the maximum allowable rotation speed.
Alarm Indication
U Series: A. 51, A. 52, A. C1, A. C2
H Series: E22
M Series: A. L-16, A. L-19, A. L-20
R Series: O. RUN
Probable cause
Item to check
Countermeasure
Abnormal speed command input
·
The voltage of the speed com-
mand input (analog input) is
higher than the voltage corre-
sponding to the maximum allow-
able rotation speed.
·
The frequency of the command
pulse input (pulse-train input) is
higher than the frequency corre-
sponding to the maximum allow-
able rotation speed.
·
Decrease the command speed.
Parameter setting mistake.
·
The speed command scale ex-
ceeds the maximum allowable
rotation speed. (Applicable to
analog input.)
·
Fix the speed command scale
setting.
·
The encoder dividing ratio set-
ting for pulse output is too small.
(Applicable to analog input.)
·
Fix the number of output pulses.
·
The electronic gear ratio is too
large. (Applicable to pulse-train
input.)
·
Fix the electronic gear ratio.
Overspeeding due to
overshooting.
·
Overshooting exceeding the
maximum allowable rotation
speed results at the time of ac-
celeration.
(Use the speed monitor.)
·
Adjust the gain and suppress the
overshooting as much as pos-
sible.
Abnormal encoder cable
Abnormal resolver cable
·
The cable is disconnected.
·
The cable is short-circuited.
* Check the resistance of the
cable alone.
·
Replace the encoder cable.
·
Replace the resolver cable.
Power cable disconnection.
·
The power cable is discon-
nected.
* Check the resistance of the
cable alone.
·
Replace the power cable.
Abnormal motor.
·
Motor phases are open.
*Check the resistance of the
motor alone.
·
Replace the motor.
Signal errors caused by noise.
·
None of the above items applies.
·
The frequency and conditions of
error are indefinite.
·
Take countermeasures against
noise. Refer to
Chapter 4 Coun-
termeasures Against Noise
.
Servo Driver Errors
Chapter 3
AUDIN - 7 bis rue de Tinqueux - 51100 Reims - France - Tel : 03.26.04.20.21 - Fax : 03.26.04.28.20 - Web : http: www.audin.fr - Email : [email protected]







































































