























EN-22
Acceleration / Deceleration / Jerk Settings
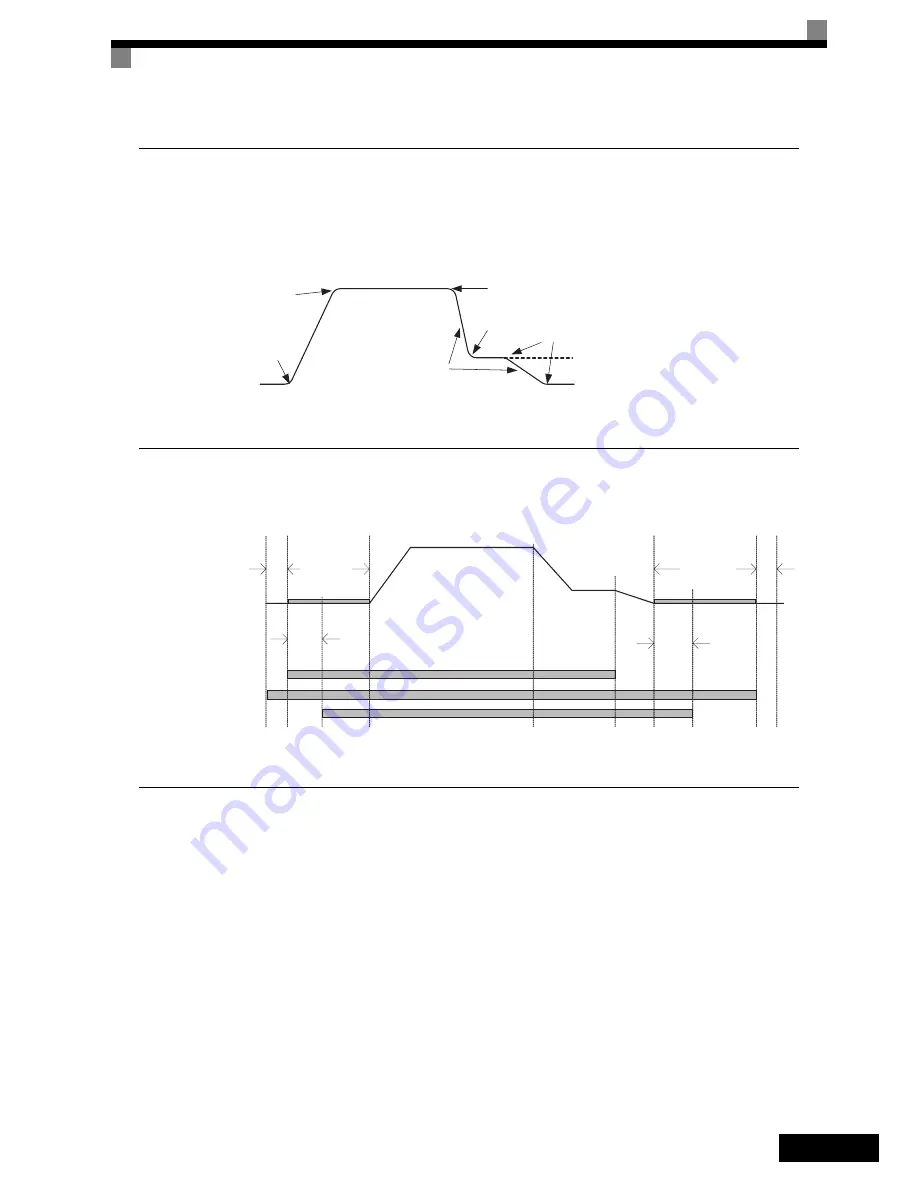
The acceleration time indicates the time to increase the speed from 0% to 100% of the maximum speed set in
E1-04. The deceleration time indicates the time to decrease the speed from 100% to 0% of E1-04.
The standard acceleration/deceleration times are set in the parameters C1-01/02, the jerk settings (S-curve) are
set in the C2-
parameters as shown in
Fig 9
.
Fig 9 Acceleration / Deceleration and Jerk (S-curve) settings
Brake Sequence
The figure below shows the standard brake sequence.
Fig 10 Timing chart of Brake sequence without torque compensation at start
Inertia Compensation (Feed Forward)
Feed Forward Control is used to eliminate the speed overshoot or undershoot by compensating inertia effects.
It can be enabled by setting parameter n5-01 to 1. After that the motor acceleration time n5-05 must be tuned.
Motor Acceleration Time Auto Tuning (n5-05)
Before the n5-02 auto tuning is performed, the motor data autotuning and the general setup should have been
finished. Do the tuning with the factory settings for the n5-
parameters.
Use the following procedure:
1. Set n5-05 to “1” to enable the auto tuning and go back to the speed reference display.
2. Set the base block input.
3. Enable the inspection speed input. “FFCAL” will blink in the display to signalize that the calculation is
active.
4. Set an UP command. The inverter will accelerate the motor up to the nominal speed. Release the UP com-
mand a few seconds after the top speed has been reached.
Accel Time
C1-01
Decel Time
C1-02
C2-01
C2-02
C2-03
C2-04
C2-05
Leveling Speed
RUN
Inverter Hardware BB D/I
Brake Open Command
Speed
S1-04
Zero servo/
DC Injection
at start
S1-16
RUN delay time
Selected Speed
Leveling Speed
S1-05
Zero servo/
DC inhection
at stop
S1-07
Brake close
delay time
S1-19
Contactor open delay
S1-06
Brake open
Delay time







































































