





























31
HT may change the PID constants even though the PID constants are ideal for
the control system. Refer to
9-1 Engineering Level for details.
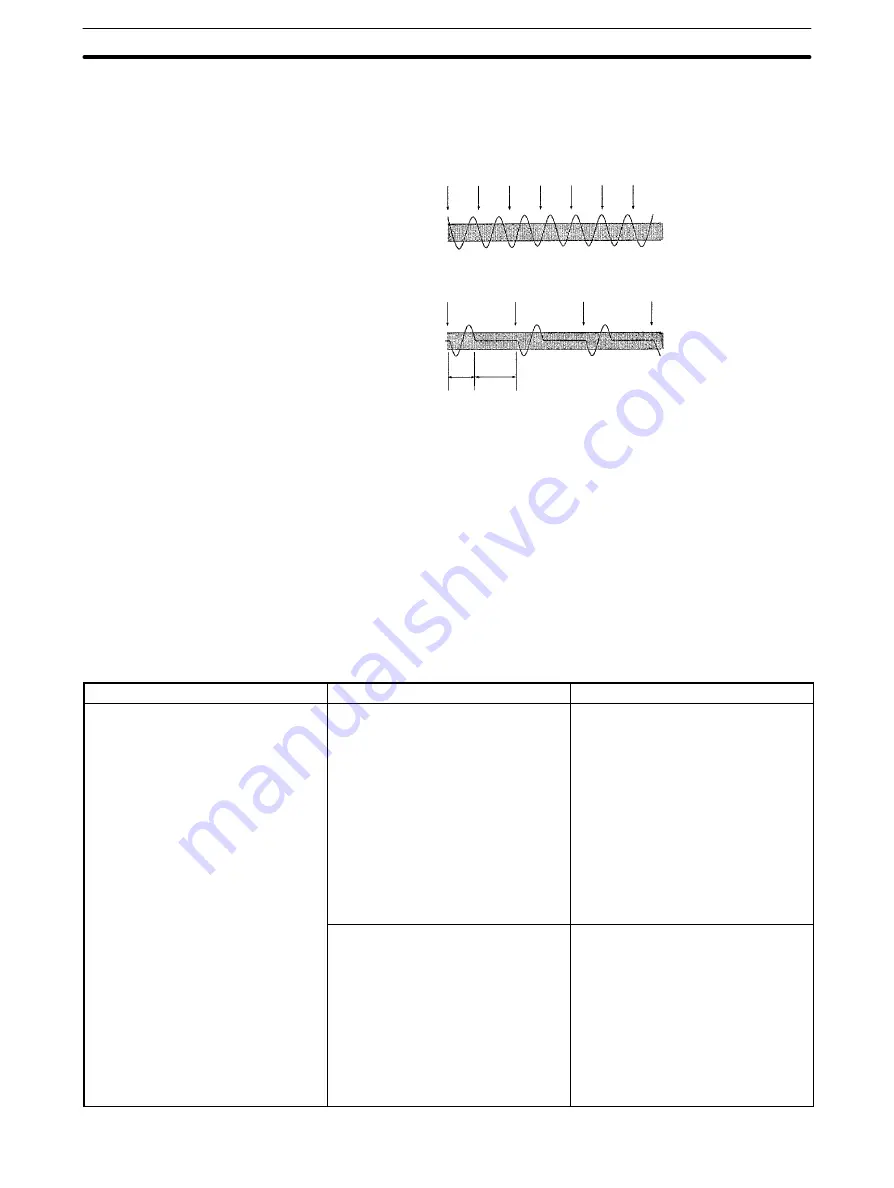
External disturbance
Figure A: Waveform with HT turned ON
External disturbance
Figure B: Waveform with HT turned OFF
T1
T2
T1<T2
Note The stable range is set to 27
°
F with the E5
J-
-F.
4-2
Troubleshooting
Fuzzy self-tuning may not exhibit its full capability due to the characteristics and
conditions of the controlled object.
Refer to the following table for troubleshooting when Unit operation is not
smooth.
Phenomenon
Probable cause
Countermeasure
The temperature does not reach the
set point.
The dead time measured was longer
than the actual value and
inappropriate PID constants were
obtained because the load (such as a
heater) was turned on after the
Temperature Controller started
operating. (Refer to
4-3-6 Startup for
details.)
Do the following to execute SRT
again.
1) Set the control mode to the
advanced PID and set the
proportional band to 0.1
°
C.
2) Set the control mode to the
advanced PID with fuzzy
self-tuning again.
3) Wait until the temperature of the
control system is stable, and then
turn on the Temperature Controller
and the load simultaneously or
turn on the load first for SRT.
The PID constants were changed from
the most ideal value because HT is
ON continuously when there was a
periodic temperature change larger
than the stable range due to an
external disturbance. Refer to the note
under 4-1-3.
Do either one of the following so that
HT will not be ON.
•
Change the stable range to a
wider setting than the range of the
temperature change and execute
SRT again by executing steps 1)
to 3) above.
•
After obtaining the most ideal PID
constants by executing steps 1) to
3) above, set the control mode to
advanced PID.
Troubleshooting
Section 4-2







































































