





























14
3. Setting up the System
3.1. System Setup Procedures
The operation procedure of Simulink and Sysmac Studio is given below.
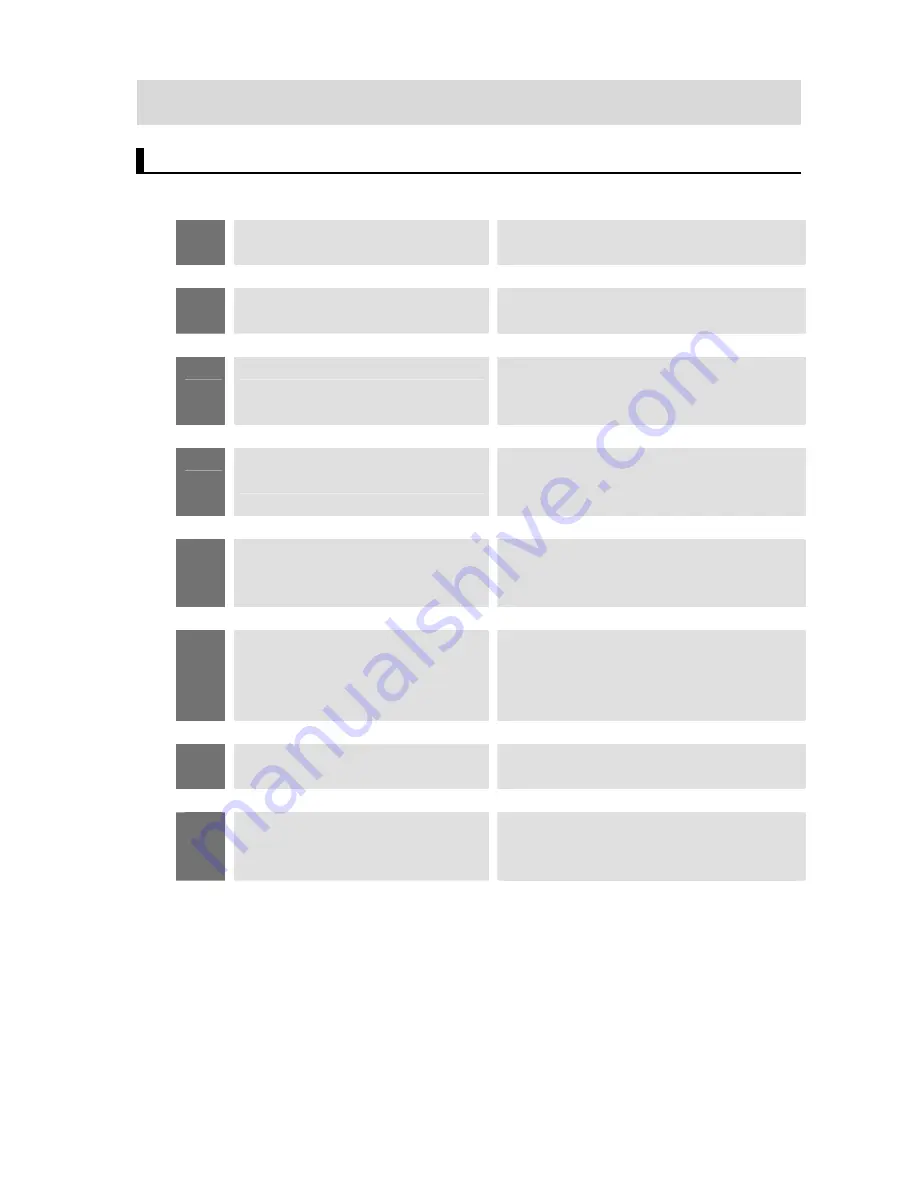
3.2.1
Outputting the Code using the Simulink PLC
Coder
You make a setting for outputting the code for the
Sysmac Studio and output the code with test code.
▼
3.2.2
Importing the Code into the Sysmac Studio
You import the code outputted by the Simulink PLC
Coder into the Sysmac Studio.
▼
3.2.3
Checking the Calculation Accuracy
You confirm that the code has the same calculation
accuracy as the Simulink (within the acceptable error
range) by a simulation.
▼
3.2.4
Creating the EtherCAT Network
Configuration
You register a R88D-KN01L-ECT Servo Drive that
operates as axis 0 on the EtherCAT network
configuration.
▼
3.2.5
Setting the Axis
You add an axis to control the Servo Drive, assign the
Servo Drive to the axis, and make the axis parameter
settings.
▼
3.2.6
Creating Programs
You create a program for calling the function blocks
whose code was outputted by the Simulink PLC
Coder and a program for outputting command values
to the Servo Drive.
▼
3.2.7
Synchronization (Download)
You transfer the programs and parameter settings to
the physical CPU Unit.
▼
3.2.8
System Operation Check
You execute the operation according to the programs
transferred to the physical CPU Unit and check the
operation using the data trace function.
Summary of Contents for DA0271
Page 38: ...2013 0613 W529 E1 01...





















































