





























Example Programs
Appendix B
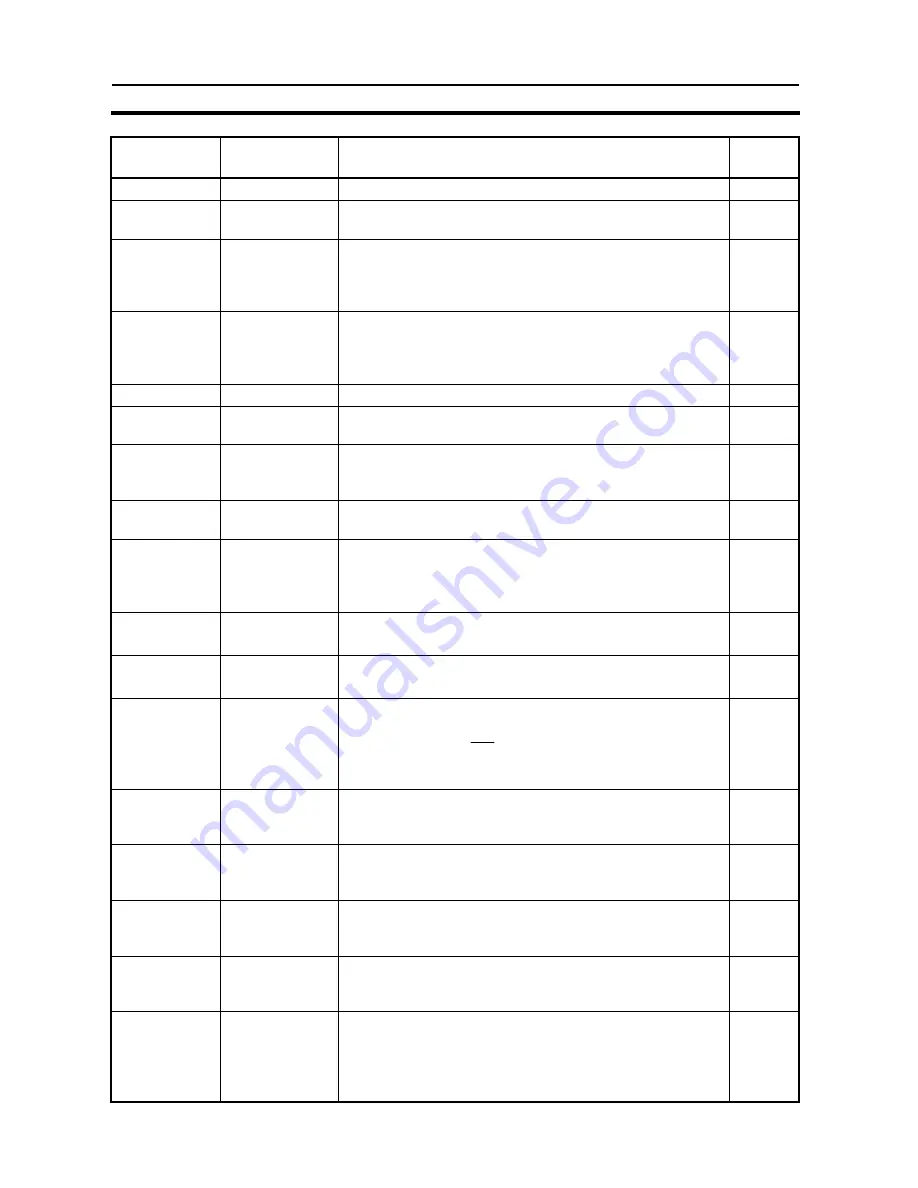
Parameter Type
Description
Default
Value
2.00
BIT (R/W)
Control_Mode : 0=Speed, 1=Position
0
2.01
BIT (R/W)
Position_Reset : 1=reset . Use with SET. Resets to zero
when done
0
2.02
BIT (R/W)
Home_Request : 1=Home is requested. The sequence
begins. Once finished we can have either 3.00=1
(Home_OK) or 3.01=1 (Home_Error). The maximum time to
perform home is defined in DM32
0
2.03
BIT (R/W)
Speed_Run_Fwd : In Speed mode (2.00=0), it generates
Run forward of the inverter with 2.03=1. The speed
reference from DM2036. 209.00=0 and 209.01=0 for full
PLC control.
0
2.04
BIT (R/W)
Speed_Run_Rev : Like 2.03, but in reverse direction
0
3.00
BIT (R)
Home_OK : When home is finished and OK, this bit is
activated
--
3.01
BIT (R)
Home_Error : If home is not finished in the defined timeout
DM32, then Home_Error appears and the sequence is
cancelled.
--
3.02
BIT (R)
In_Position1 : The finest in position. Defined window in
DM16. Used for the positioner work itself.
--
3.03
BIT (R)
In_Position2 : Available for fastest sequence work. We
define in DM18. Typically used to start processes slightly
before the final position is reached (activate a valve, move
other axis, etc.).
--
DM10 DWORD
(R/W)
BCD
SP : BCD. SetPoint of position (in units) DM10 and DM11
0
DM12 DWORD
(R/W)
BCD
SP_PV_Scale_N1 : Numerator of SP&PV scaling
1
DM14 DWORD
(R/W)
BCD
SP_PV_Scale_N2 : Denominator of SP&PV scaling
Scaling is ..
quads
N2
N1
units
=
∗
Default values correspond to direct quad control
1
DM16 DWORD
(R/W)
BCD
In_Position1_Window : Defines the width of the In_Position
output 1. This has to be the most accurate positioning
window. Usually just some units. In units
2
DM18 DWORD
(R/W)
BCD
In_Position2_Window : Defines a wider window for use in
the software sequence (start some actions just while the
movement is being finished). In quads
20
DM20
DWORD (R/W)
BCD
Home_Initial_Pos : In units. Defines the initial movement to
an initial position <>0 after the homing process has been
defined.
0
DM22 DWORD
(R/W)
Decimal
Max_Frequency : Value in speed units from the inverter
(depends on n035). We recommend n035 to leave standard
(0) so we have the best resolution (0.01Hz).
2000
DM24 DWORD
(R/W)
BCD
P_Gain : This is the factor that will generate the final speed
reference from the position error quads. If it is too big we
will have overshoot. If too low, positioning will be slow. If we
have big inertia it might happen that even with small gain
we have instability.
10
82
Summary of Contents for 3G3MV-P10CDT-E
Page 2: ...3G3MV P10CDT PLC Option Unit User s Manual Revised June 2003 ...
Page 38: ...Unit Components and Specifications SECTION 2 2 1 4 Dimensions 68 128 55 25 ...
Page 43: ......
Page 85: ...Example Programs Appendix B 72 ...
Page 86: ...Example Programs Appendix B 73 ...
Page 87: ...Example Programs Appendix B 74 ...
Page 88: ...Example Programs Appendix B 75 ...
Page 90: ...Example Programs Appendix B 77 ...
Page 91: ...Example Programs Appendix B 78 ...
Page 97: ...Example Programs Appendix B B 4 9 Programs User_Parameter_Init 84 ...
Page 98: ...Example Programs Appendix B 85 ...
Page 99: ...Example Programs Appendix B User_Application Pos_Loop 86 ...
Page 100: ...Example Programs Appendix B 87 ...
Page 101: ...Example Programs Appendix B 88 ...
Page 102: ...Example Programs Appendix B 89 ...
Page 103: ...Example Programs Appendix B 90 ...
Page 104: ...Example Programs Appendix B 91 ...
Page 105: ...Example Programs Appendix B 92 ...
Page 106: ...Example Programs Appendix B 93 ...
Page 107: ...Example Programs Appendix B Pos_Home_Sequence 94 ...
Page 108: ...Example Programs Appendix B 95 ...
Page 109: ...Example Programs Appendix B 96 ...





















































