





























where
U
phnom
is the nominal voltage,
k
factor
is ratio within range 0-100%,
pp
is the number of pole-pairs and
N
nom
are the
nominal revolutions. Changes V/Hz factor won't be propagated to the m1_pmsm_appconfig.h!
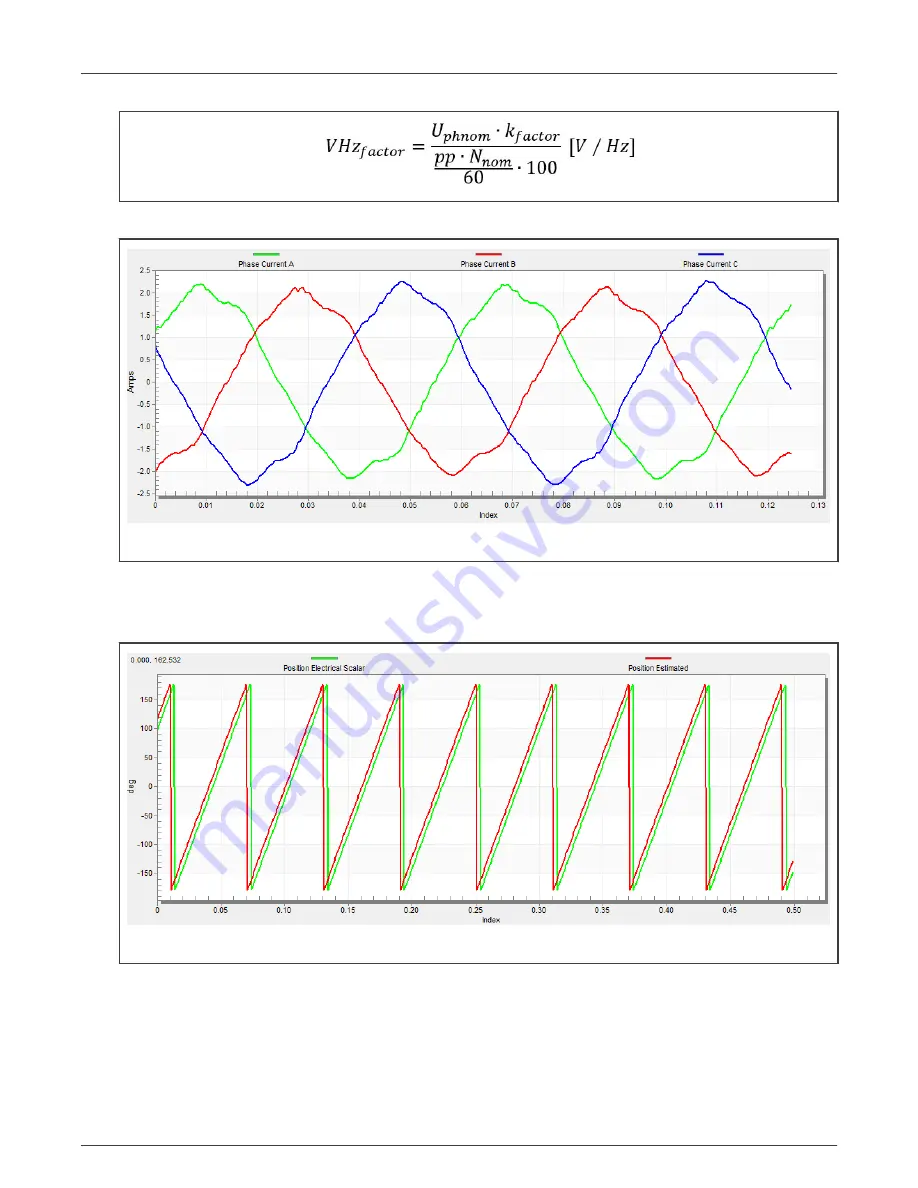
Figure 22. Phase currents
6. Select the “Position” recorder to check the observer functionality. The difference between the “Position Electrical Scalar”
and the “Position Estimated” should be minimal (see
) for the Back-EMF position and speed observer to work
properly. The position difference depends on the motor load. The higher the load, the bigger the difference between the
positions due to the load angle.
Figure 23. Generated and estimated positions
7. If an opposite speed direction is required, set a negative speed value into the “M1 Scalar Freq Required” variable.
8. The proper observer functionality and the measurement of analog quantities is expected at this step.
9. Enable the voltage FOC mode in the "M1 MCAT Control" variable while the main application switch "M1 Application Switch"
is turned off.
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
34 / 50







































































