





























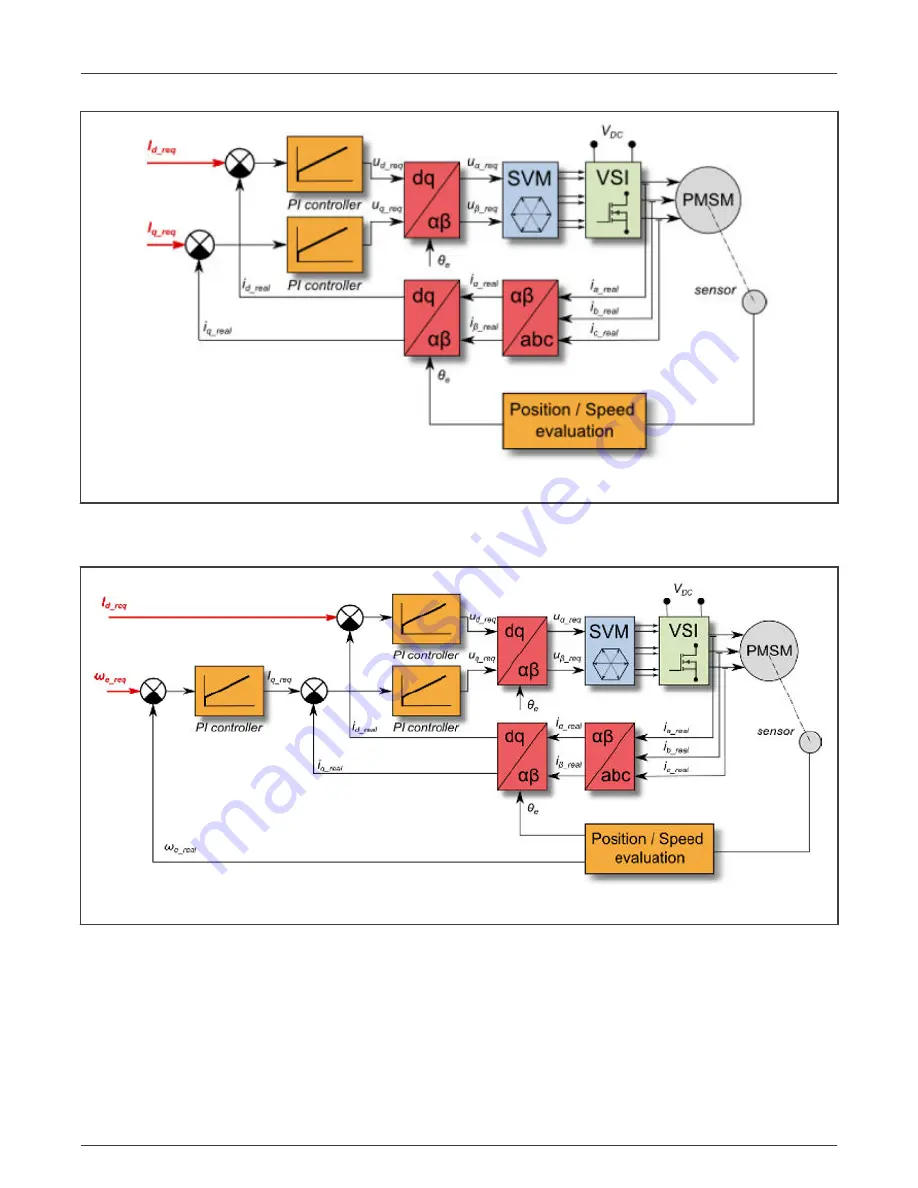
Figure 17. Current (torque) control mode
The speed PMSM sensor/sensorless FOC (its diagram is shown in
) is activated by enabling the speed FOC control
structure. Enter the required speed into the “M1 Speed Required” field. The d-axis current reference is held at 0 during the entire
FOC operation.
Figure 18. Speed FOC control mode
The position PMSM sensor FOC is shown in
(Not available for all devices). The position control using the P controller can
be tuned in the “Speed loop” menu tab. An encoder sensor is required for the feedback. Without the sensor, the position control
does not work. A braking resistor is missing on the FRDM-MC-LVPMSM board. Therefore, it is needed to set a soft speed ramp
(in the “Speed loop” menu tab) because the voltage on the DC-bus can rise when braking the quickly spinning shaft. It may cause
the overvoltage fault.
NXP Semiconductors
Remote control using FreeMASTER
MCUXpresso SDK Field-Oriented Control (FOC) of 3-Phase PMSM and BLDC motors, Rev. 0, 01/2022
User Guide
25 / 50







































































