





























Chapter 12
Synchronization
©
National Instruments Corporation
12-29
LabVIEW Code
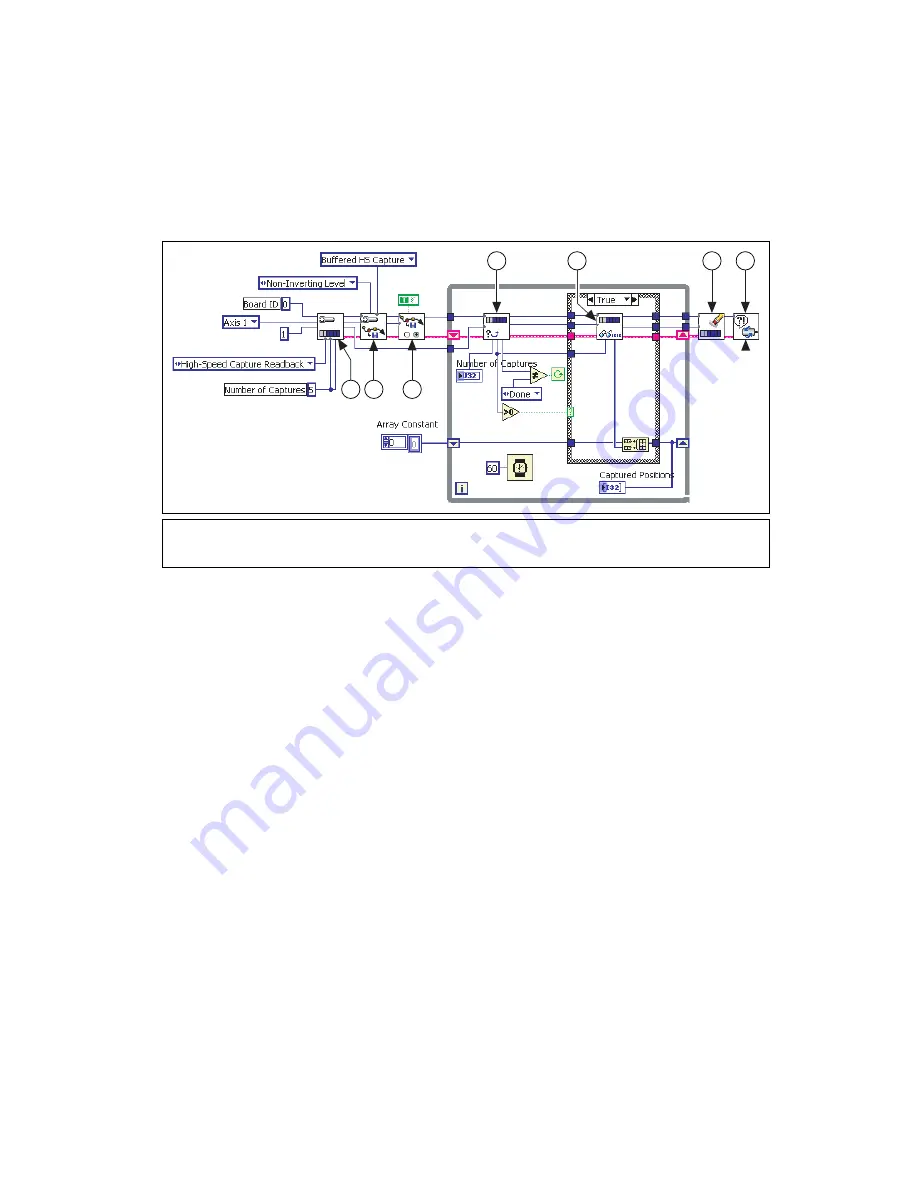
Figure 12-17.
Buffered High-Speed Capture in LabVIEW
C/C++ Code
The following example code is not necessarily complete, and may
not compile if copied exactly. Refer to the
examples
folder on the
NI-Motion CD for files that are complete and compile as is.
//
Main Function
void main(void)
{
u8
boardID;//
Board identification number
u8
axis;//
Axis number
u16
csr = 0;//
Communication status register
i32
bufferSize = 100;//
The size of the buffer to
allocate on the
//
motion controller
u32
totalPoints = 100;//
The number of high speed
capture to
//
acquire
i32
capturedPositions[100];//
Array to store the
captured
//
positions
f64
actualInterval;//
The interval at which the
motion controller can
//
really contour
u32
backlog;//
Indicates the available space for
captured positions
1
Configure Buffer
2
Configure High-Speed Capture
3
Enable High-Speed Capture
4
Check Buffer
5
Read Buffer
6
Clear Buffer
7
Motion Error Handler
4
1
6
7
3
2
5





















































