





























Ps34001b_oi_e.doc / 19.11.15
Page 19 / 43
7.2
Description of the Parameters
Prior to register setting you must decide which dimensions or length units (LU) you like to use for
preset of the incremental length or absolute positions. This could be 0.1mm or 1mm or 0.001 inch
or any other resolution you desire. All further settings refer to the Length Units you decided to
use. E.g. when you chose to set the length with a 0.1 mm resolution, 1000 LUs will represent a
length of 100.0 millimeters with all further entries.
7.2.1
Position Setting
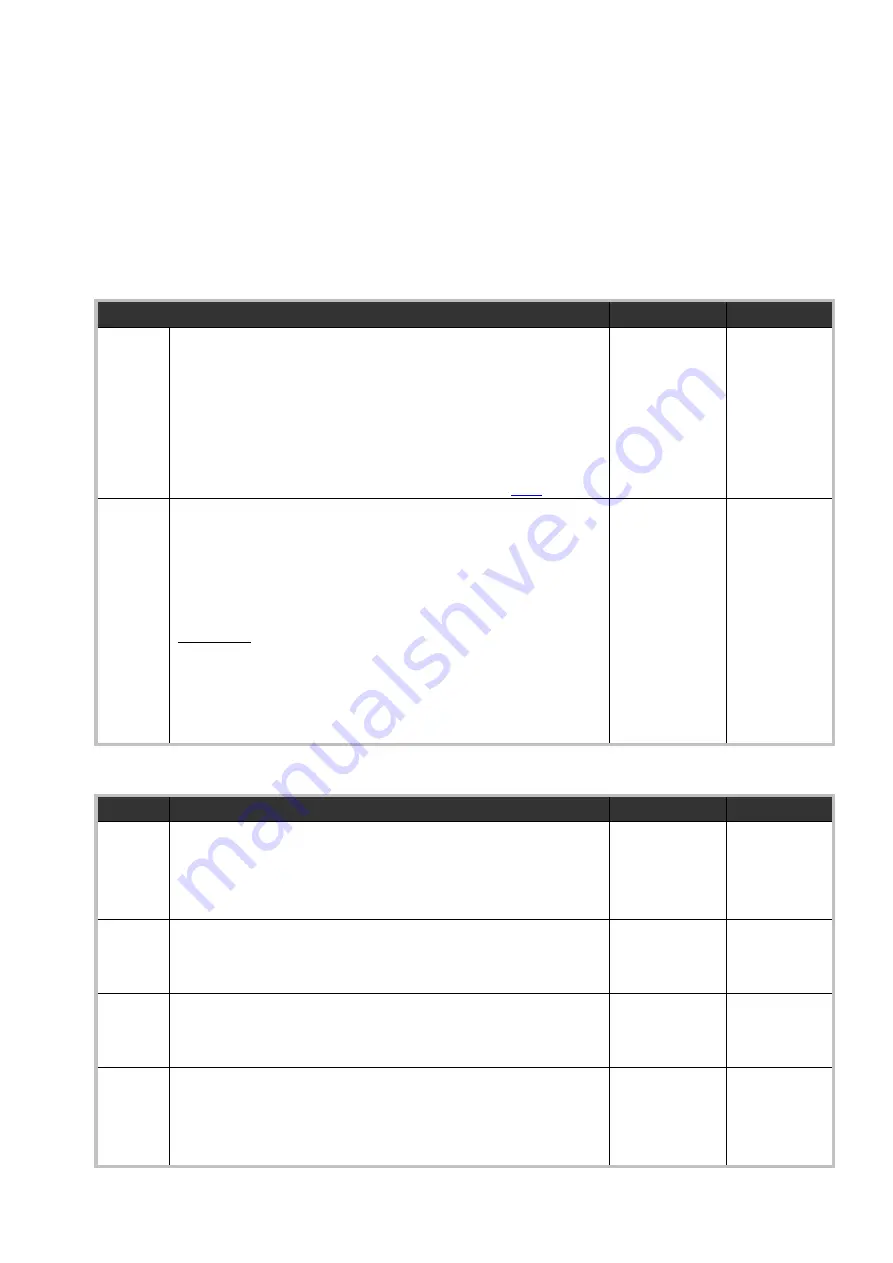
F01
Range
Default
F01.000 Incremental Length:
Moving length setting for incremental length operation
and relative positioning. In mode 0, 1 or 4 (see parameter
F02.002) the position advances always the same distance
upon each start.
With a PS641 variant, the value can be set by the
thumbwheel switch on the front (see chapter
1 to 999999
10000
F01.001 Position Number:
This is a pointer to an absolute position value stored in
parameter F02.015 “Position 0” to F02.024 “Position 9”.
In mode 2 and 3 the position number determines the new
absolute target position.
Attention: In mode 3 (loop operation), this register is
automatically incremented with each start and follows
the branch instructions within a program loop. After an
interruption of a loop cycle, be aware where the pointer
is or set it to start position again.
0 to 9
0
7.2.2
Operational Settings
F02
Range
Default
F02.002 Operation Mode:
This setting selects one of the five general modes of
operation.
See table on the next page for details.
0 to 4
0
F02.003 Acceleration Ramp:
Determines the ramp time in s for acceleration from
standstill to full speed.
0.001 to
10.000
1.000
F02.004 Deceleration Ramp:
Determines the ramp time in s for deceleration from full
speed to standstill.
0.001 to
10.000
1.000
F02.005
Emergency Stop Ramp:
Deceleration ramp time in s from full of speed to
standstill at emergency stop. A setting of 0 will result in
a jump to zero.
0 to 10.000
0.100