




























14
Rev. 1.0
10/21/2018
SSDC-D/IP Hardware Manual
400-820-9661
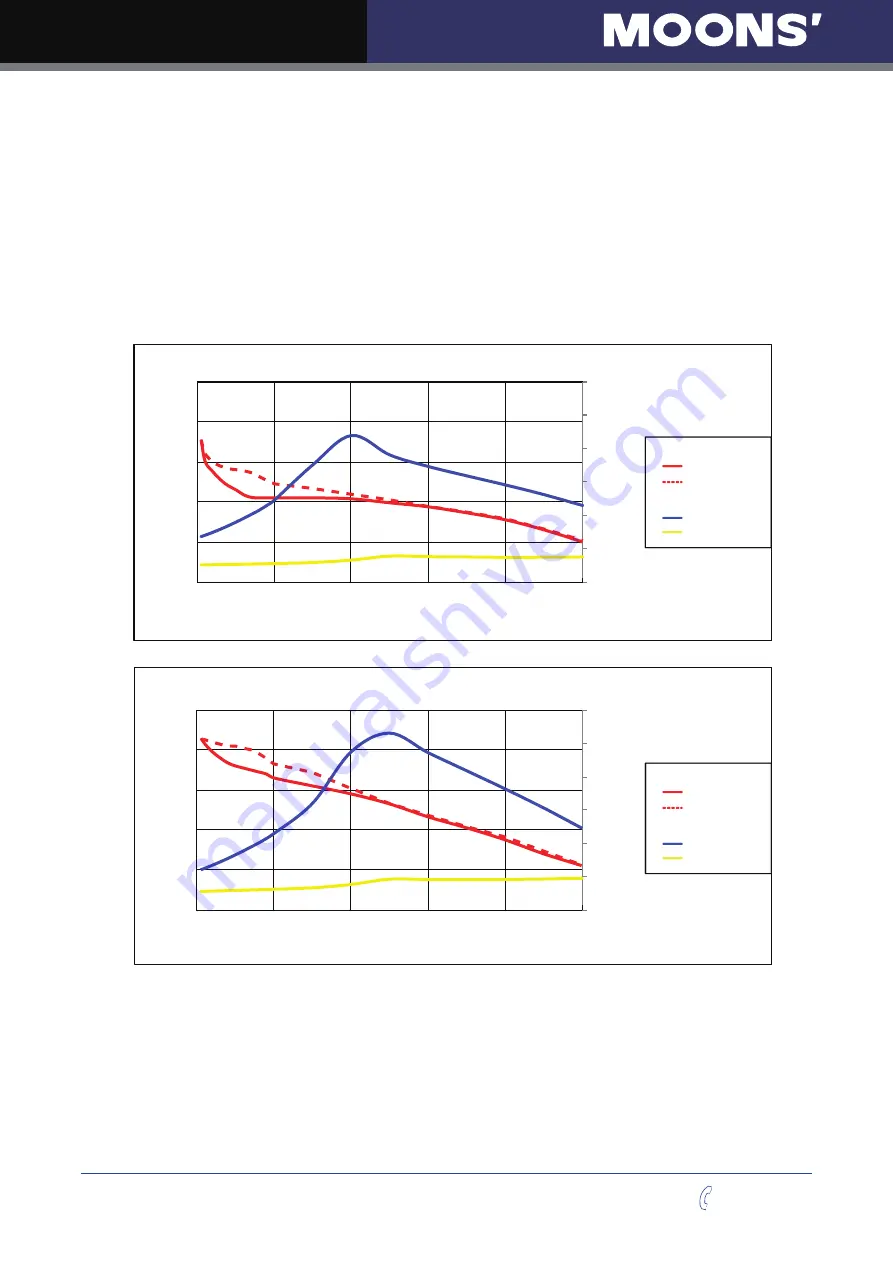
2.4.2 Current
The maximum supply currents required by the SSDC series step servo drive and motor are shown
below in chats at different power supply voltage input. The SSDC drive power supply current is
lower than the winding currents because it uses switching amplifiers to convert a high voltage and
low current into low voltage and high current. The more power supply voltage exceeds the motor
voltage, the less current will be required from the power supply.
It is important to note that the current draw is significantly different at higher speeds depending
on the torque load to the motor. Estimating how much current is necessary may require a good
analysis of the load to the motor.
AM11RS1DMA 24V Power
Torque
(m
N
.m
)
Amps
Continuous
Torque
Boost
Supply Current
Full Load
Full Load
Speed
(rps)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0
20
40
60
80
100
0
10
20
30
40
50
AM11RS2DMA 24V Power
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0
20
40
60
80
100
0
10
20
30
40
50
Torque
(m
N
.m
)
Amps
Continuous
Torque
Boost
Supply Current
Full Load
No Load
Speed
(rps)







































































