























2
22
2-
--
-
1
8
1
8
1
8
1
8
Confirming the operation
Confirming the operation
Confirming the operation
Confirming the operation
2
22
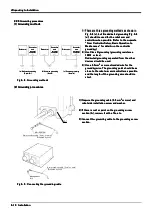
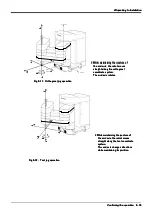
2Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
2.4 Confirming the operation
2.4 Confirming the operation
2.4 Confirming the operation
2.4 Confirming the operation
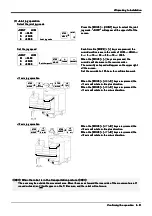
In this section, the robot will be moved manually using the T/B to confirm that the operation is correct.
In this section, the robot will be moved manually using the T/B to confirm that the operation is correct.
In this section, the robot will be moved manually using the T/B to confirm that the operation is correct.
In this section, the robot will be moved manually using the T/B to confirm that the operation is correct.
Moving the robot manually is called "jog operation". This operation includes the joint jog that moves each axis, the
Moving the robot manually is called "jog operation". This operation includes the joint jog that moves each axis, the
Moving the robot manually is called "jog operation". This operation includes the joint jog that moves each axis, the
Moving the robot manually is called "jog operation". This operation includes the joint jog that moves each axis, the
orthogonal jog that moves along the orthogonal coordinate system, and the tool jog that moves along the tool
orthogonal jog that moves along the orthogonal coordinate system, and the tool jog that moves along the tool
orthogonal jog that moves along the orthogonal coordinate system, and the tool jog that moves along the tool
orthogonal jog that moves along the orthogonal coordinate system, and the tool jog that moves along the tool
coordinate system.
coordinate system.
coordinate system.
coordinate system.
This operation is carried out while pressing the deadman switch on the back of the T/B.
This operation is carried out while pressing the deadman switch on the back of the T/B.
This operation is carried out while pressing the deadman switch on the back of the T/B.
This operation is carried out while pressing the deadman switch on the back of the T/B.
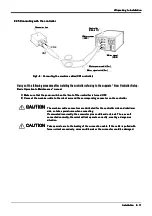
The robot will move during this operation. Make sure that there are no operators
The robot will move during this operation. Make sure that there are no operators
The robot will move during this operation. Make sure that there are no operators
The robot will move during this operation. Make sure that there are no operators
near the robot, and that there are no obstacles, such as tools, in the robot operation
near the robot, and that there are no obstacles, such as tools, in the robot operation
near the robot, and that there are no obstacles, such as tools, in the robot operation
near the robot, and that there are no obstacles, such as tools, in the robot operation
range.
range.
range.
range.
To immediately stop the robot, release the deadman switch on the back of the T/B.
To immediately stop the robot, release the deadman switch on the back of the T/B.
To immediately stop the robot, release the deadman switch on the back of the T/B.
To immediately stop the robot, release the deadman switch on the back of the T/B.
The servo power will turn OFF, and the robot will stop.
The servo power will turn OFF, and the robot will stop.
The servo power will turn OFF, and the robot will stop.
The servo power will turn OFF, and the robot will stop.
The robot will also stop if the [EMG.STOP] switch (emergency stop switch) on the
The robot will also stop if the [EMG.STOP] switch (emergency stop switch) on the
The robot will also stop if the [EMG.STOP] switch (emergency stop switch) on the
The robot will also stop if the [EMG.STOP] switch (emergency stop switch) on the
front of the T/B or the [EMG.STOP] switch (emergency stop) on the front of the
front of the T/B or the [EMG.STOP] switch (emergency stop) on the front of the
front of the T/B or the [EMG.STOP] switch (emergency stop) on the front of the
front of the T/B or the [EMG.STOP] switch (emergency stop) on the front of the
controller is pressed.
controller is pressed.
controller is pressed.
controller is pressed.
Confirm that the origin has been set. If the origin has not been set, "****" will
Confirm that the origin has been set. If the origin has not been set, "****" will
Confirm that the origin has been set. If the origin has not been set, "****" will
Confirm that the origin has been set. If the origin has not been set, "****" will
appear at the current position display on the teaching pendant, the joint jog
appear at the current position display on the teaching pendant, the joint jog
appear at the current position display on the teaching pendant, the joint jog
appear at the current position display on the teaching pendant, the joint jog
operation will take place in any jog mode selected. Refer to
operation will take place in any jog mode selected. Refer to
operation will take place in any jog mode selected. Refer to
operation will take place in any jog mode selected. Refer to page
origin" for details on setting the origin.
origin" for details on setting the origin.
origin" for details on setting the origin.
origin" for details on setting the origin.
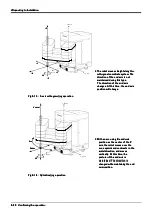
Fig.2-
1
0
:
Joint jog operation
Fig.2-
1
0
:
Joint jog operation
Fig.2-
1
0
:
Joint jog operation
Fig.2-
1
0
:
Joint jog operation
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
CAUTION
-
-
-
-
+
+
+
+
J2
axis
J2
axis
J2
axis
J2
axis
-
-
-
-
+
+
+
+
J1
axis
J1
axis
J1
axis
J1
axis
-
-
-
-
-
-
-
-
+
+
+
+
+
+
+
+
J4
axis
J4
axis
J4
axis
J4
axis
J3
axis
J3
axis
J3
axis
J3
axis
* Each axis moves independently.
* Each axis moves independently.
* Each axis moves independently.
* Each axis moves independently.
X
X
X
X





































































