





























18
2 APPENDIX
2.1 CC-Link IE TSN
Cyclic transmission
Cyclic transmission is a function that cyclically exchanges data between stations.
Cyclic transmission of motion mode
Cyclic transmission of the motion mode is a function that uses PDOs to cyclically exchange data between stations.
A PDO is an aggregate of objects such as [Modes of operation (Obj. 6060h)] and [Modes of operation display (Obj. 6061h)].
The placement of objects in a PDO is called PDO mapping, and the initial placement (default PDO mapping) is defined. The
PDO received by each station is called an RPDO, and the PDO transmitted by each station is called a TPDO.
PDOs are transferred using the cyclic Ms frame (from the master station to the slave station) and the cyclic Ss frame (from the
slave station to the master station).
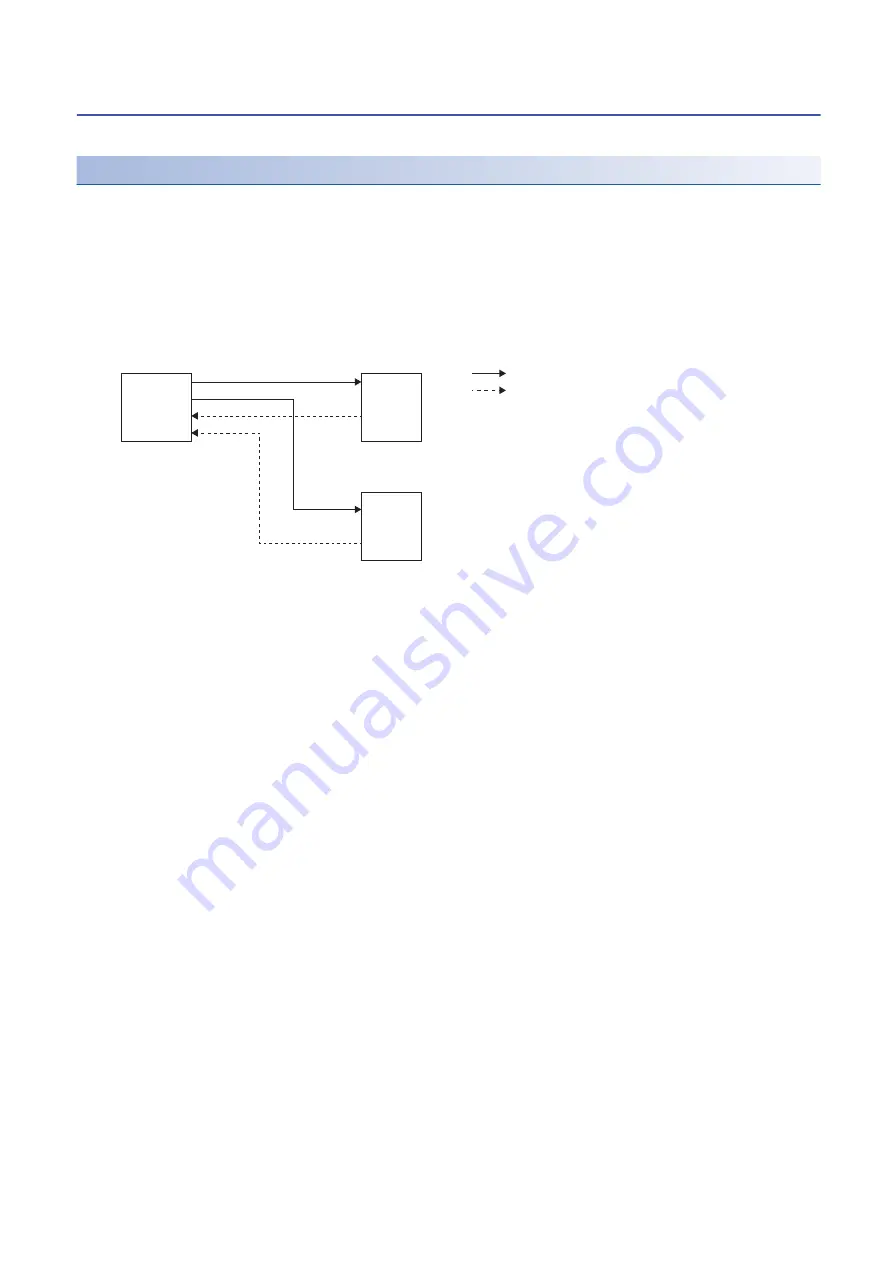
A conceptual figure of communication between the master station and the slave station is shown below.
RPDO1
RPDO2
TPDO1
TPDO2
RPDO1
RPDO2
TPDO1
TPDO2
Axis 1 TPDO1
Axis 2 TPDO1
Axis 1 RPDO1
Axis 2 RPDO1
Station 1
Station 2
Station 1
Station 2
Master station
(Controller)
Slave station 1
(1-axis servo amplifier)
: Ms (from the master to the slave)
: Ss (from the slave to the master)
Slave station 2
(1-axis servo amplifier)







































































