





















Rev #
23
Version 7.10
December
2019
After power on, the main display unit
also sends polar data and pilot information
so that
they are
synchronized
in both devices.
The user can define which data will be
automatically synchronized
between the devices
.
Waypoint
and task databases ar
e not
synchronized
between the devices
. In order
to
have databas
es
synchronized,
you have to use the SD card and copy files from
the rear to front device or vice versa. See Chapter 5.1.5.5
for how to copy
waypoint
files.
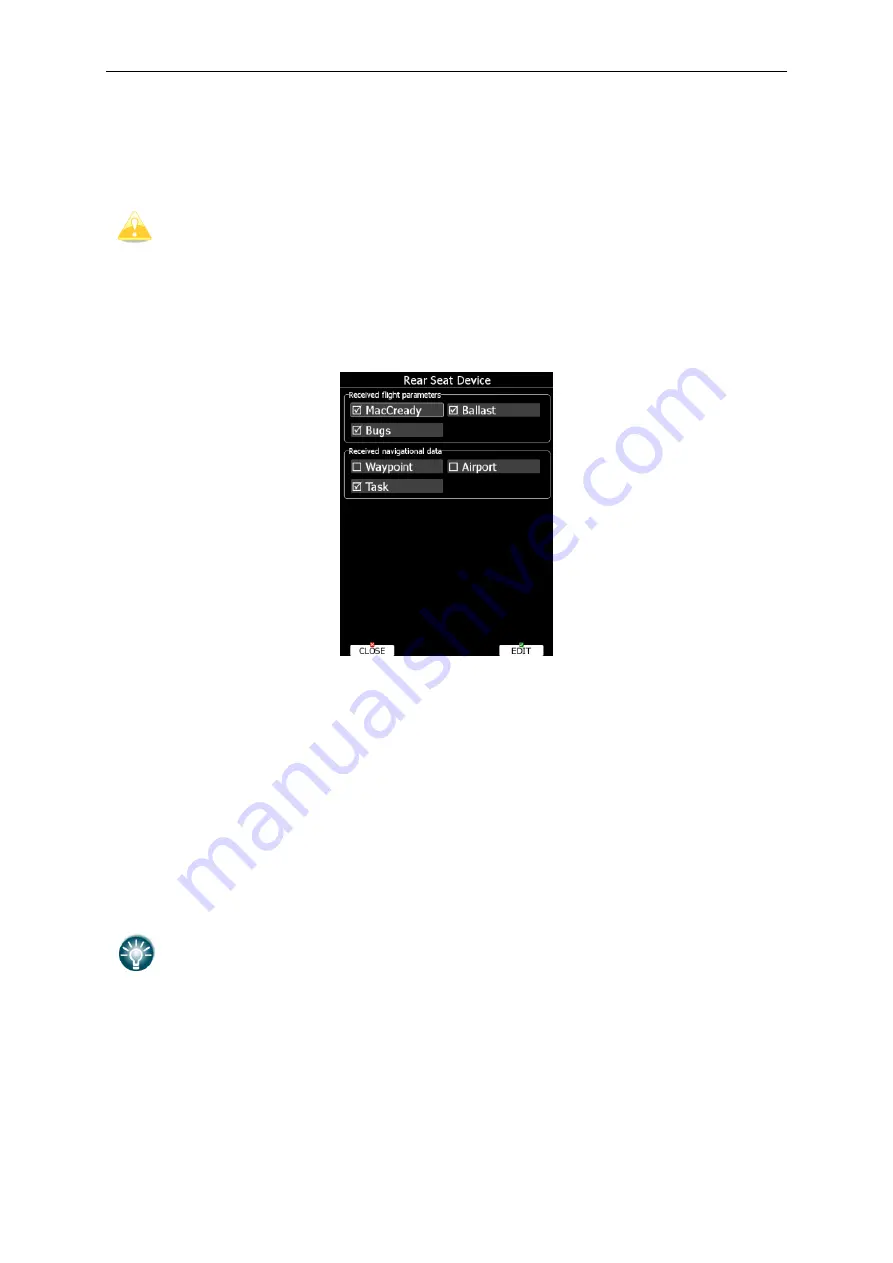
To set up data which is going to be received from th
e
rear seat device, enter the “Rear seat
device” menu on
the m
ain display unit
(see Chapter 5.1.11.9).
To define which data
i
s going to be received from the main display unit
go to the
“Front seat
device” menu (see Chapter 5.1.11.9).
Data are
divided into two groups; flight
parameters and navigational data. If a specific
value is checked this value will be automatically be received from the other device.
Check
MacCready
,
Ballast
and/or
Bugs
to receive the current MacCready value, current
ballast setting or bugs from the other device.
If
Waypoint
is checked a new
waypoint
target will
be automatically assigned when the user
changes the
waypoint target on the other devi
ce. A message
“Waypoint target received”
will be shown on the screen and you will be navigating to the same
waypoint as other
device. Please note that it is not necess
ary to have this waypoint
in your databases as the
complete
waypoint
information is sent. If
Waypoint
is not checked it is still possible to
send a target to another
device using the
SEND
action i
n waypoint mode. The same
applies to the
Airport
checkbox.
The message
“Airport
target received”
is displayed. If the
Task
checkbox is checked the task will be synchronised with the other device.
When flying an assigned area task,
it is worth having
Task
unchecked. This will
allow one pilot to play with “wha
t
if” scenarios. Once
a proper direction is found
the task
can be sent
to the other de
vice using the
SEND
action in task mode.





















































