




























39
Connection with PC 1
1.
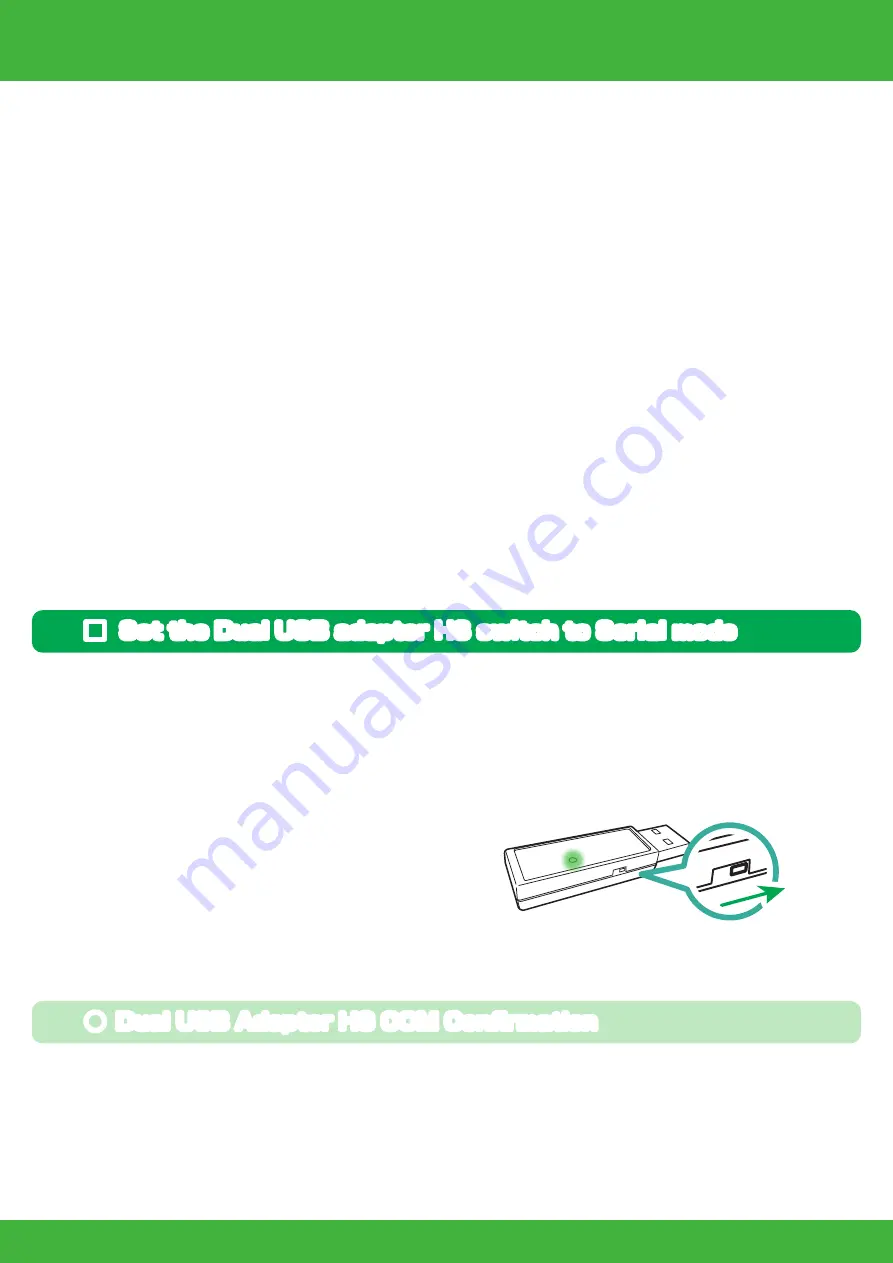
Set the Dual USB adapter HS switch to Serial mode, connect the Black-and-White Extension
Cable, and then plug it into theUSB port of your personal computer.When connected to the USB
port in ICS mode, the Dual USB Adapter HS
LED lights Green.
2.
When connected to the Windows PC for the
first time, the “Add New Hardware Wizard” will
automatically run. Complete the setup following
the KO Driver Installation Manual in the USB
folder in the included CD-ROM.
■ Set the Dual USB adapter HS switch to Serial mode
When the Dual USB Adapter HS driver installation is completed, confirm the “COM Port
Number” .This number is important when using the software, so please write it down. The method of
confirming the COM number is included in the KO Driver Installation Manual in the USB folder in the
included CD-ROM. Point Operation Tips Caution for Breakage Confirmation Required.
● Dual USB Adapter HS COM Confirmation
KO Driver is driver software that enables Windows OS to recognize Kondo Kagaku s USB adaptor.
This allows the servos and robot to communicate with the PC via a USB connection.
In the following, adjustments are made to the robot using a computer. When all the processes are
completed, the robot will begin to walk. Conduct the processes by following the procedures below.
▼ Process procedures
Connecting with PC
■ Set the Dual USB adapter HS switch to Serial mode
Connect the Dual USB adaptor HS to the PC
■ Install the HTH4 (HeartToHeart4) motion creation software
Connect the robot to the PC
■ Turn on the robot
Run motion
■ Adjust the trim
Adjust the posture for bilateral symmetry with the robot in the upright position.
■ Run the sample motion
Enable the low voltage motion setting to prevent over discharge, and run the motion.
Serial mode
LED:GREEN







































































