


























4
MDrivePlus CANopen R020507
Device Control
The starting and stopping of the drive and several mode specific commands are executed by the state machine.
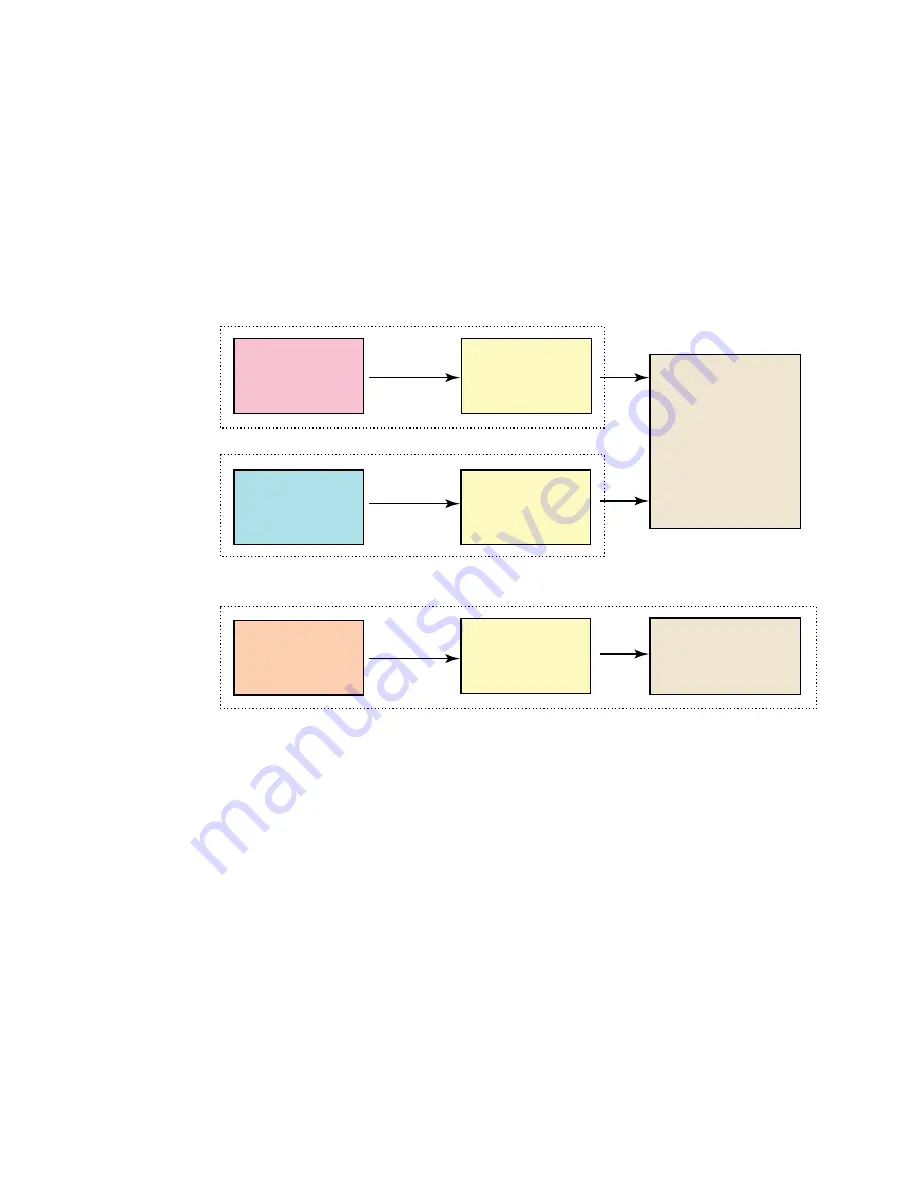
Modes of Operation
The operation mode defines the behavior of the drive. The following modes are defined in this profile:
Homing Mode
This chapter describes the various methods to find a home position (also: reference point, datum, zero point).
Profile Position Mode
The positioning of the drive is defined in this mode. Speed, position and acceleration can be limited and profiled moves using
a Trajectory Generator are possible as well.
Profile Velocity Mode
The Profile Velocity Mode is used to control the velocity of the drive with no special regard of the position. It supplies limit
functions and trajectory generation.
Homing Function
Position Function
Velocity Function
Trajectory
Generator
Trajectory
Generator
Trajectory
Generator
Position Control
Loop
Velocity Control
Loop
Homing Mode (Section X)
Profile Position Mode (Section X)
Profile Velocity Mode (Section X)
Figure 1.3: Functional Architecture
Summary of Contents for MDrive DSP-402
Page 1: ...Excellence in Motion DSP 402 APPLICATION GUIDE TM TM CANopen TM FORCE DRIVE CANopen...
Page 8: ...vi This Page Intentionally Left Blank...
Page 10: ...MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 16: ...MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 42: ...34 MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 56: ...48 MDrivePlus CANopen R020507 Page Intentionally Left Blank...







































































