





























27
Part 2: DSP-402 Implementation
Power Disabled
Power Enabled
Fault
Start
Not Ready to Switch On
Fault Reaction Active
Fault
Switch On Disabled
Ready To Switch On
0
1
2
7
4
5
6
Switched On
Operation Enable
Quick Stop Active
9
3
8
16
11
10 12
14
13
15
Controlword 6040
h
Internal
Event
Statusword
6041
h
SUPPORT FOR FAULT
STATES UNDER
DEVELOPMENT
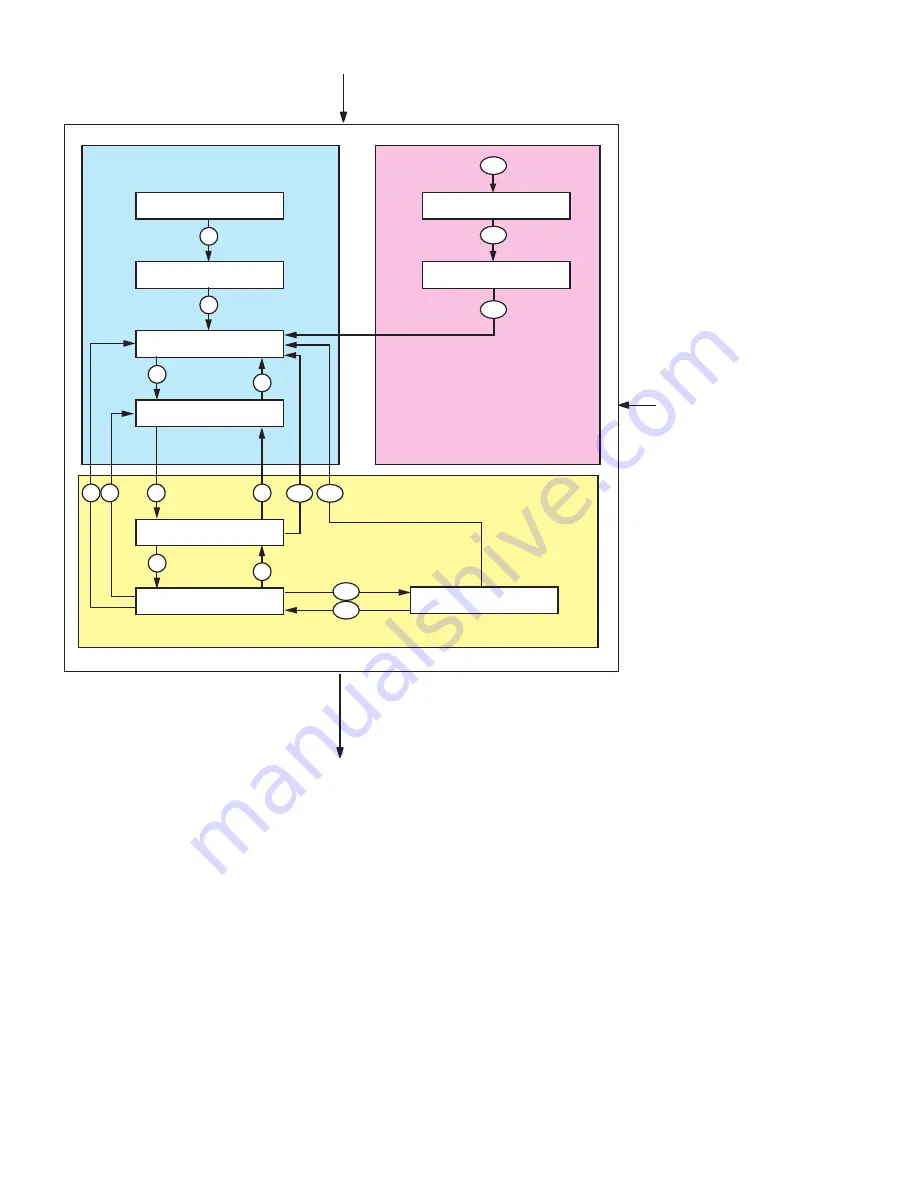
Figure 4.2: State Machine States/Transitions Block Diagram
Notes On State Transitions
Commands directing a change in state are processed completely and the new state achieved before additional state
change commands are processed.
Transitions 0 and 1 occur automatically at drive power-on or reset. All other state changes must be directed by the
host.
Drive function disabled indicates that no current is being supplied to the motor.
Drive function enabled indicates that current is available for the motor and profile position and profile velocity
reference values may be processed.
Summary of Contents for MDrive DSP-402
Page 1: ...Excellence in Motion DSP 402 APPLICATION GUIDE TM TM CANopen TM FORCE DRIVE CANopen...
Page 8: ...vi This Page Intentionally Left Blank...
Page 10: ...MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 16: ...MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 42: ...34 MDrivePlus CANopen R020507 Page Intentionally Left Blank...
Page 56: ...48 MDrivePlus CANopen R020507 Page Intentionally Left Blank...







































































