























65
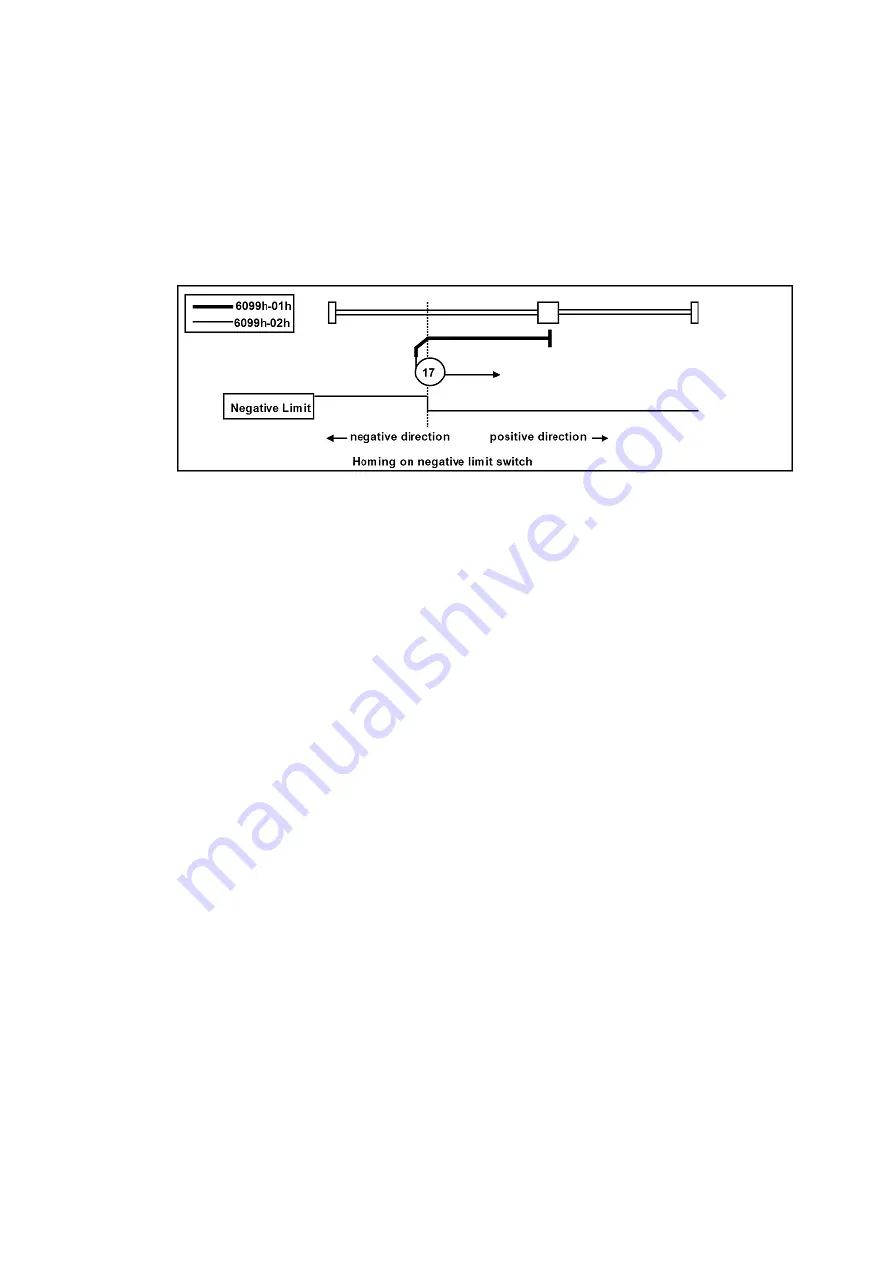
Method 17
If LL switch is not activated at the beginning of the action, the initial action
direction is the negative direction.
If the LL switch has been activated at the beginning of the action, the initial
action direction is the positive direction.
The home detection position is the position when the status of LL changes.
Summary of Contents for ECAT-2094P
Page 1: ...ECAT 2094P EtherCAT 4 Axis Pulse Output Module User Manual Version 1 0...
Page 10: ...10 2 2 Alias Rotary Swtich The Alias range is 0x00 0xFF...
Page 15: ...15 2 5 Stepper Motor Wiring...
Page 17: ...17 Figure 2 Open collector wiring diagram...
Page 24: ...24 is the total execution time of all slave application related operations...
Page 71: ...71 Method35 37 The home detection position is the current position...





















































