





























51
6.6.2
Profile Position Mode(pp mode)
In this mode, specify the target position, target speed, acceleration and deceleration,
etc., and the driver will drive the motor to move after generating instructions
internally in accordance with the motion parameters.
Steps
1. Set the operation mode (Mode of operation: 6060h) to Profile position mode (pp
mode) Value = 0x01, and confirm (Mode of operations Display: 6061h) = 0x01.
2. Change (Controlword: 6040h) from the value 0x06
→
0x07
→
0x0F to make the
control system Servo On state.
3. Change the target position (Target Position: 607Ah).
4. Change the target velocity (Profile velocity: 6081h), this object is restricted by the
setting value of (Max profile velocity: 607Fh).
5. Change acceleration (Profile acceleration: 6083h), this object is limited by the
setting value of (Max acceleration: 60C5h).
6. Change the deceleration (Profile decceleration: 6084h), this object is limited by the
setting value of (Max decceleration: 60C6h).
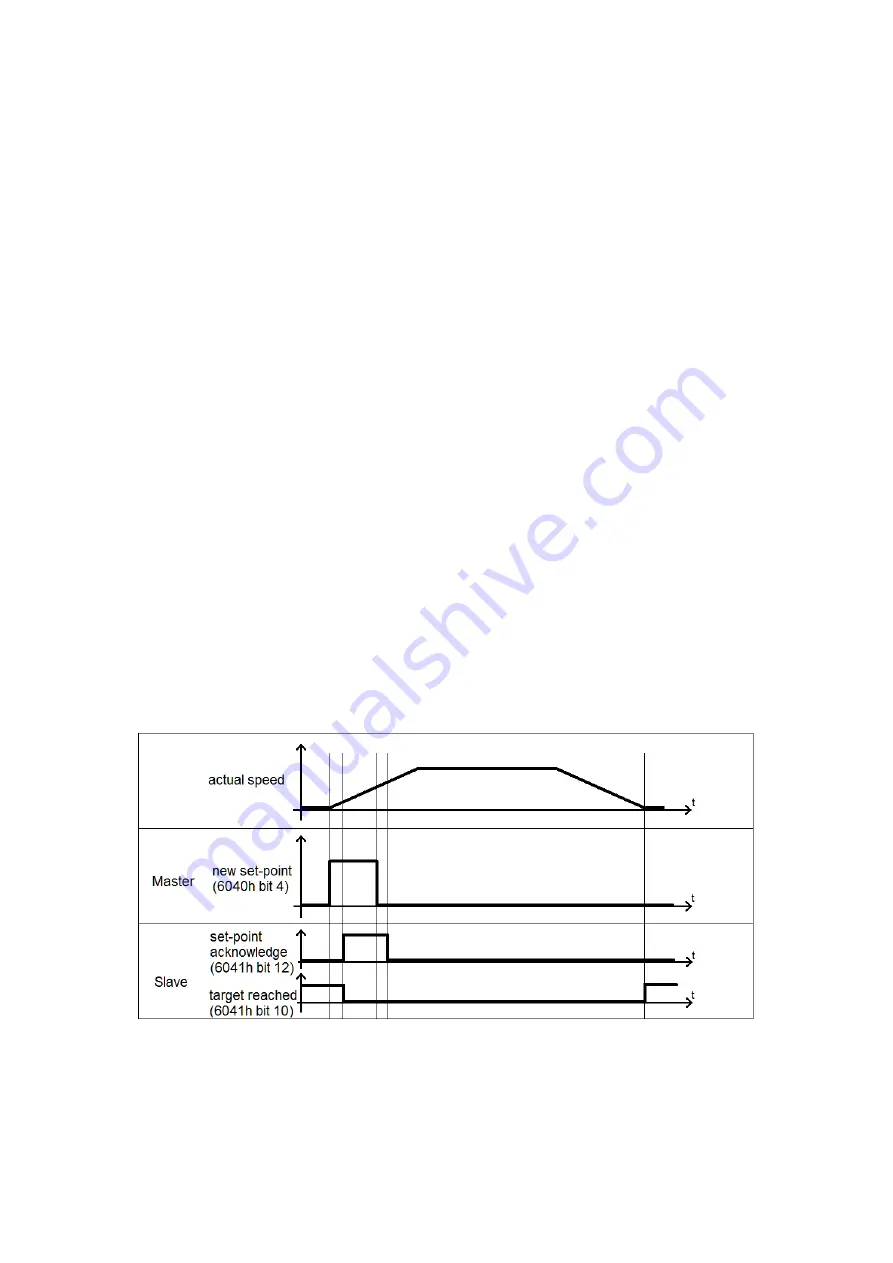
7. Set bit 4 (new set-point) of 6040h to change from 0 to 1, and the motor starts to
operate.
8. Confirm that bit 12 (set-point acknowledge) of 6041h is from 0 to 1.
9. Confirm that bit10 (target reached) of 6041h is 1, and the positioning is
completed.
Summary of Contents for ECAT-2094P
Page 1: ...ECAT 2094P EtherCAT 4 Axis Pulse Output Module User Manual Version 1 0...
Page 10: ...10 2 2 Alias Rotary Swtich The Alias range is 0x00 0xFF...
Page 15: ...15 2 5 Stepper Motor Wiring...
Page 17: ...17 Figure 2 Open collector wiring diagram...
Page 24: ...24 is the total execution time of all slave application related operations...
Page 71: ...71 Method35 37 The home detection position is the current position...





















































