





























58
12. Precautions for Use
12. Precautions for Use
12.1 Setting the Acceleration/Deceleration
Set the acceleration/deceleration using the graphs below as a reference.
(1) PTP operation (Set using the SEL language commands ACCS and DCLS.)
Acceler
ation deceleration (%)
Acceler
ation deceleration (%)
IX arm length 500/600
Reference settings for PTP
acceleration/deceleration
IX arm length 500/600
Reference duties for PTP
continuous operation
Maximum
setting range
Reference range for
continuous operation
Reference range of duty for
continuous operation duty
Duty (%)
Inertial moment (kg-m
2
)
Duty (%) = (Continuous operation /
(Continuous ope Stopping time)) / 100
Mass of carrying load (kg)
Axis 4 (rotational axis) only
Acceler
ation deceleration (%)
Acceler
ation deceleration (%)
IX arm length 700/800
Reference settings for PTP
acceleration/deceleration
IX arm length 700/800
Reference duties for PTP
continuous operation
Maximum
setting range
Reference range for
continuous operation
Reference range of duty for
continuous operation duty
Duty (%)
Inertial moment (kg-m
2
)
Duty (%) = (Continuous operation /
(Continuous ope Stopping time)) / 100
Mass of carrying load (kg)
Summary of Contents for IX Series
Page 2: ......
Page 4: ......
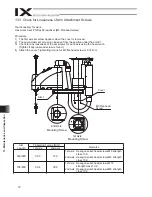
Page 56: ...50 9 How to Install ...
Page 58: ...52 9 How to Install Center of recommended installation part ...
Page 104: ......
Page 105: ......






































































