





























Theory of Device Operation
4-10
C141-E145-02EN
4.5.3 Command processing during self-calibration
This enables the host to execute the command without waiting for a long time,
even when the disk drive is performing self-calibration. The command execution
wait time is about maximum 72 ms.
When the error rate of data reading, writing, or seeking becomes lower than the
specified value, self-calibration is performed to maintain disk drive stability.
If the disk drive receives a command execution request from the host while
performing self-calibration, it stops the self-calibration and starts to execute the
command. In other words, if a disk read or write service is necessary, the disk
drive positions the head to the track requested by the host, reads or writes data,
and then restarts calibration after 10 seconds.
If the error rate recovers to a value exceeding the specified value, self-calibration
is not performed.
4.6 Read/write Circuit
The read/write circuit consists of the read/write preamplifier (HDIC), the write
circuit, the read circuit, and the time base generator in the read channel (RDC).
Figure 4.4 is a block diagram of the read/write circuit.
4.6.1 Read/write preamplifier (HDIC)
HDIC equips a read preamplifier and a write current switch, that sets the bias
current to the MR device and the current in writing. Each channel is connected to
each data head, and HDIC switches channel by serial I/O. In the event of any
abnormalities, including a head short-circuit or head open circuit, the write unsafe
signal is generated so that abnormal write does not occur.
4.6.2 Write circuit
The write data is output from the hard disk controller (HDC) with the NRZ data
format, and sent to the encoder circuit in the RDC. The NRZ write data is
converted from 48-bit data to 50-bit data by the encoder circuit then sent to the
HDIC, and the data is written onto the media.
(1) 48/50 RLL MEEPRML
This device converts data using the 48/50 RLL (Run Length Limited) algorithm.
(2) Write precompensation
Write precompensation compensates, during a write process, for write non-
linearity generated at reading.
Summary of Contents for MHR2010AT
Page 1: ...C141 E145 02EN MHR2040AT MHR2030AT MHR2020AT MHR2010AT DISK DRIVES PRODUCT MANUAL ...
Page 4: ...This page is intentionally left blank ...
Page 8: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 12: ...This page is intentionally left blank ...
Page 32: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
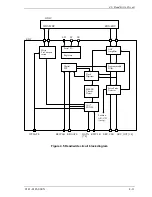
Page 58: ...Theory of Device Operation 4 6 C141 E145 02EN Figure 4 3 Circuit Configuration ...
Page 188: ...Interface 5 114 C141 E145 02EN g d f f d e Figure 5 7 Normal DMA data transfer ...
Page 240: ...This page is intentionally left blank ...
Page 242: ...This page is intentionally left blank ...
Page 246: ...This page is intentionally left blank ...
Page 248: ...This page is intentionally left blank ...
Page 249: ......
Page 250: ......






































































