104
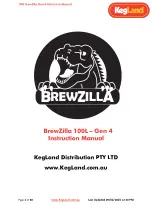
Triggering torques and weight-distance diagram
M
ax
. p
os
si
bl
e
di
sp
la
ce
m
en
t
z
di
re
ct
io
n
[m
m
]
~
30
The values listed only apply when in a static state!
x/
y
di
re
ct
io
n
[°]
~
45
Ac
tiv
at
ed
w
ith
in
3
00
m
m
d
is
ta
nc
e
m
ax
[°
]
1.
52
75
m
ax
[m
m
]
8
m
in
[°
]
0.
66
4
m
in
[m
m
]
3.
5
W
ei
gh
t (
di
st
an
ce
[m
m
])
[k
g]
40
0
15
.7
8
30
0
21
.0
3
20
0
31
.5
5
10
0
63
.1
50
12
6.
2
Tr
ig
ge
rin
g
to
rq
ue
(+
/-
10
%
)
63
.1
N
m
C
ra
sh
Bo
x
/i
XX
L
0
25
50
75
10
0
-20
30
80
130
180
230
280
330
380
weig
ht [
kg]
/i X
L
Cr
as
hB
ox
/i PA
P
XL
44,
0350,
3759
Cr
as
hB
ox
/i
44,
0350,
3589
=
Cr
as
hB
ox
/i
P
AP
44,
0350,
3663
distance to the robots flange [mm]
12
5
Cr
as
hB
ox /i XXL
44,0350,3380
Cr
as
hB
ox
44,
0350,
3760
Summary of Contents for TPS/i Robotics TWIN Push
Page 2: ...2...
Page 6: ...6...
Page 18: ...18...
Page 19: ...General Information...
Page 20: ......
Page 38: ...38...
Page 39: ...Welding Technology Aspects...
Page 40: ......
Page 52: ...52...
Page 53: ...Operating controls connections and mechanical components...
Page 54: ......
Page 59: ...59 EN US 4 Dummy cover 5 Dummy cover...
Page 61: ...Installation and Startup...
Page 62: ......
Page 76: ...76 Prepare torch body with steel inner liner 1 2 3 4 5 6 1 2 3 4 5 6...
Page 77: ...77 EN US 7 8 9 10 11 12 7 8 9 10 11 12...
Page 80: ...80 5 6 1 2 4 1 5...
Page 87: ...Troubleshooting Maintenance and Disposal...
Page 88: ......
Page 95: ...Technical Data...
Page 96: ......
Page 105: ...105 EN US...
Page 106: ...106...
Page 107: ...107 EN US...